< Назад | Содержимое | Далее >
4. ОПИСАНИЕ ПАРАМЕТРОВ B-64700RU/01
4.18 ПАРАМЕТРЫ СЕРВОДВИГАТЕЛЯ (1 ИЗ 2)
![]()
№7 №6 №5 №4 №3 №2 №1 №0
RBK | FFR | CVR |
1800
RBK | FFR | CVR |
[Тип ввода] Ввод параметров [Тип данных] Бит пути
#1 CVR Если сигнал готовности контроля скорости VRDY установлен на ON до того, как сигнал готовности контроля положения PRDY получил значение ON
0: Выдается аварийный сигнал серводвигателя.
1: Аварийный сигнал серводвигателя не выдается.
№3 FFR Упреждающее регулирование при ускоренном перемещении: 0: Откл.
1: Вкл.
Упреждение активируется только при нормальной рабочей подаче. Если данный параметр установлен на 1, упреждение также активируется при ускоренном перемещении. Такая возможность сокращает позиционное отклонение серводвигателя, сокращая тем самым время входа в пределы заданной позиции во время позиционирования.
ПРИМЕЧАНИЕ
1 Данный параметр становится действительным после завершения возврата в исходную позицию.
2 Данный параметр используется при начальной настройке. Подробная информация приводится в приложении
«Автоматическая настройка и начальная настройка параметров» в Руководстве по выполнению соединений (функциональная часть) (B-64693EN-1).
№4 RBK Компенсация мертвого хода, применяющаяся независимо для рабочей подачи и ускоренного перемещения:
0: Не выполняется
1: Выполняется
№7 №6 №5 №4 №3 №2 №1 №0
CIN | CCI |
1801
CIN | CCI |
[Тип ввода] Ввод параметров [Тип данных] Бит пути
№4 CCI В качестве пределов заданной рабочей подачи используется:
0: Параметр № 1826, применимый также для ускоренного перемещения.
1: Параметр № 1827, предназначенный для рабочей подачи. Данный параметр активирует пределы заданной позиции для рабочей подачи (параметр № 1827) вместо пределов заданной позиции для ускоренного перемещения (параметр № 1826).
![]()
B-64700RU/01 4. ОПИСАНИЕ ПАРАМЕТРОВ
Бит 4 (CCI) параметра № 1801 используется для выбора этой функции или традиционной функции проверки выхода в заданное положение.
После активации данная функция используется на всех осях. Поэтому для оси, которая не требует данной функции, установите такие же данные в параметре № 1826 и 1827.
№5 CIN Если параметр CCI имеет значение 1, то используется параметр, предназначенный для активации пределов заданной позиции для рабочей подачи:
0: Только если следующий кадр задает рабочую подачу. 1: Независимо от следующего кадра.
В таблице ниже показаны взаимосвязи между параметрами рабочей подачи и ускоренного перемещения.
| Бит 5 (CIN) параметра № 1801 | ||||
0 | 1 | ||||
Ускоренное перемещение Ускоренное перемещение | № 1826 | Ускоренное перемещение Ускоренное перемещение | № 1826 | ||
0 | Ускоренное перемещение Рабочая подача | № 1826 | Ускоренное перемещение Рабочая подача | № 1826 | |
Рабочая подача Рабочая подача | № 1826 | Рабочая подача Рабочая подача | № 1826 | ||
Бит 4 (CCI) параметра № 1801 | Рабочая подача Ускоренное перемещение | № 1826 | Рабочая подача Ускоренное перемещение | № 1826 | |
Ускоренное перемещение Ускоренное перемещение | № 1826 | Ускоренное перемещение Ускоренное перемещение | № 1826 | ||
1 | Ускоренное перемещение Рабочая подача | № 1826 | Ускоренное перемещение Рабочая подача | № 1826 | |
Рабочая подача Рабочая подача | № 1827 | Рабочая подача Рабочая подача | № 1827 | ||
Рабочая подача Ускоренное перемещение | № 1826 | Рабочая подача Ускоренное перемещение | № 1827 | ||
Параметры CCI и CIN можно также использовать для оси Cs.
№7 №6 №5 №4 №3 №2 №1 №0
BKL15x | DC2x | DC4x |
1802
BKL15x | DC2x | DC4x |
[Тип ввода] Ввод параметров [Тип данных] Бит оси
№1 DC4x Если исходная позиция определена на линейной шкале с исходными отметками:
0: Абсолютное положение определяется обнаружением трех исходных отметок.
1: Абсолютное положение определяется обнаружением четырех исходных отметок.
![]()
4. ОПИСАНИЕ ПАРАМЕТРОВ B-64700RU/01
№2 DC2x Определение исходной позиции на линейной шкале с исходными отметками выполняется следующим образом:
0: Выполняется установка бита 1 (DC4x) параметра № 1802.
1: Абсолютное положение определяется обнаружением двух исходных отметок.
ПРИМЕЧАНИЕ
1 Если этот параметр имеет значение 1, задайте направление нулевой точки шкалы в настройке бита 4 (SCP) параметра
№ 1817.
2 Если используется угловой энкодер с исходными отметками абсолютных адресов, этот параметр недействителен. Даже если этот параметр имеет значение 1, применяется настройка бита 1 (DC4x) параметра № 1802.
№4 BKL15x Если при компенсации мертвого хода определяется направление перемещения:
0: Величина компенсации не учитывается.
1: Величина компенсации (погрешности винта, прямолинейности, сдвига внешней системы координат станка и т. д.) учитывается.
№7 №6 №5 №4 №3 №2 №1 №0
NFP | TQF | TQA | TQI |
1803
NFP | TQF | TQA | TQI |
[Тип ввода] Ввод параметров [Тип данных] Бит пути
№0 TQI В пределах ограничения крутящего момента проверка выхода в заданное положение:
0: Выполняется.
1: Не выполняется.
№1 TQA В пределах ограничения крутящего момента ошибка избыточного времени останова или времени перемещения:
0: Проверяется.
1: Не проверяется.
№4 TQF Если управление крутящим моментом выполняется с помощью управления оси PMC, то операция слежения:
0: Не выполняется
1: Выполняется.
№7 NFP Если согласование позиции станка и детектора абсолютного положения ни разу не выполнялось, то операция слежения:
0: Не выполняется
1: Выполняется.
![]()
B-64700RU/01 4. ОПИСАНИЕ ПАРАМЕТРОВ
№7 №6 №5 №4 №3 №2 №1 №0
SAK | ANA | IVO |
1804
SAK | ANA | IVO |
[Тип ввода] Ввод параметров [Тип данных] Бит пути
№4 IVO При попытке отключения аварийного останова, если сигнал игнорирования аварийного сигнала «VГТВ ВЫК» равен 1:
0: Состояние аварийного останова не отключается, пока сигнала игнорирования аварийного сигнала «VГТВ ВЫК» имеет значение 0.
1: Состояние аварийного останова отключается.
ПРИМЕЧАНИЕ
Если выдается сброс, когда сигнал игнорирования аварийного сигнала «VГТВ ВЫК» равен 1, и ток пуска двигателя находится на низком уровне, то состояние сброса можно отключить при условии, что этот параметр имеет значение 1.
№5 ANA Если на оси обнаружен непредвиденный возмущающий момент: 0: Перемещение по всем осям останавливается и выдается
аварийный сигнал серводвигателя.
1: Аварийный сигнал серводвигателя не выдается и перемещение останавливается в режиме блокировки только вдоль группы осей, содержащей ось с непредвиденным возмущающим моментом (номер группы для каждой оси устанавливается в параметре № 1881).
№6 SAK Если сигнал игнорирования IGNVRY аварийного сигнала «VГТВ ВЫК» равен 1 или если сигналы IGNVRYn игнорирования аварийного сигнала «VГТВ ВЫК» установлены на 1:
0: Сигнал готовности серводвигателя SA принимает значение 0.
1: Сигнал готовности серводвигателя SA остается равным 1.
№7 №6 №5 №4 №3 №2 №1 №0
TSM | TSA | TRE |
1805
TSM | TSA | TRE |
[Тип ввода] Ввод параметров [Тип данных] Бит пути
№1 TRE Если бит 4 (TQF) параметра № 1803 установлен на 0 (для невыполнения операции слежения с командой управления крутящим моментом при управлении осью PMC), счетчик ошибок серводвигателя:
0: Обновляется.
Если количество ошибок превышает максимально допустимое совокупное значение перемещения (параметр
№ 1885), то выдается аварийный сигнал SV0423 «ИЗБЫТ. ОШИБКА В КР.МОМ.».
1: Не обновляется.
Ошибки не накапливаются, поэтому сигнал SV0423 не выводится. Однако если превышается максимально допустимая скорость подачи, то выдается аварийный сигнал SV0422 «ИЗБЫТ. СКОР.В КР.МОМЕНТЕ».
Для возврата в регулирование по положению, если бит данного параметра равен 1, необходимо выполнить возврат в исходную позицию.
![]()
4. ОПИСАНИЕ ПАРАМЕТРОВ B-64700RU/01
№3 TSA В качестве уровня обнаружения непредвиденного возмущающего момента во время выстоя, выполнения М-кода и приостановки автоматической работы:
0: Используется пороговое значение для ускоренного перемещения. (параметр № 2142)
1: Используется пороговое значение для рабочей подачи. (параметр № 2104)
Если данный параметр равен 1, параметры ABGO (бит 3 параметра № 2200) и ABT (бит 7 параметра № 2215) необходимо выставить на 1.
#4 TSM В качестве уровня обнаружения непредвиденного возмущающего момента в режиме толчковой подачи (за исключением ручного ускоренного перемещения) и в режиме подачи штурвалом:
0: Используется пороговое значение для ускоренного перемещения. (параметр № 2142)
1: Используется пороговое значение для рабочей подачи. (параметр № 2104)
Этот параметр действителен, если бит 3 (ABGO) параметра
№ 2200 равен 1.
№7 №6 №5 №4 №3 №2 №1 №0
SWP |
1807
SWP |
[Тип ввода] Ввод параметров [Тип данных] Бит пути
№2 SWP Данный параметр определяет работу сервоусилителя серии αi в предаварийном состоянии
(например, при остановке вентилятора).
0: Аварийный сигнал выдается, когда усилитель находится в предаварийном состоянии. Автоматический режим переходит в состояние останова подачи, а ось серводвигателя замедляется до останова.
1: Аварийный сигнал не выдается, когда усилитель находится в предаварийном состоянии. Автоматический режим сохраняется. Серводвигатель отключается, если усилитель переходит из предаварийного в аварийное состояние.
![]()
![]()
ВНИМАНИЕ!
Продолжение работы после остановки внешнего вентилятора, если бит 2 (SWP) параметра № 1807 равен 1, может привести к перегреву и выдачи аварийного сигнала о перегреве,
«АВАР.IPM» или «VГТВ ВЫК» в зависимости от рабочих условий. После выдачи такого аварийного сигнала усилитель отключается и серводвигатель останавливается динамическим тормозом, что может привести к поломке заготовки или инструмента, поскольку для остановки высокой частоты вращения требуется дополнительное расстояние. По этой причине следует учитывать, что присвоение биту 2 (SWP) параметра 1807 значения 1 является временной мерой перед заменой вентилятора. После останова вентилятора немедленно замените его и верните биту 2 (SWP) параметра
№ 1807 значение 0.
Если бит 2 (SWP) параметра № 1807 имеет значение 1, на экране ЧУ мигает предупреждение FAN, указывающее на останов внешнего вентилятора. Помимо этого, следите за появлением предупредительного сигнала на PMC и напомните оператору об останове вентилятора.
B-64700RU/01 4. ОПИСАНИЕ ПАРАМЕТРОВ
№7 №6 №5 №4 №3 №2 №1 №0
ALGx | EMFx |
1814
ALGx | EMFx |
[Тип ввода] Ввод параметров [Тип данных] Бит оси
№1 EMFx В случае сдвига нулевой точки внешней системы координат станка или нулевой точки внешней расширенной системы координат станка максимальное значение сдвига за один цикл исполнения:
0: Соответствует обычному диапазону (положительные значения — 127; отрицательные значения — -128)
1: Умножается на 10 (положительные значения — 1270; отрицательные значения — -1280)
Данный параметр является действительным, когда выполняются все следующие условия.
- Система приращений B или C.
- Бит 2 (HPEx) параметра № 1816 равен 1.
№7 ALGx Усиление контура серводвигателя оси в режиме контроля контуров Cs:
0: Не совпадает с усилением в контуре контроля контуров Cs. 1: Не совпадает с усилением в контуре контроля контуров Cs.
![]()
4. ОПИСАНИЕ ПАРАМЕТРОВ B-64700RU/01
ПРИМЕЧАНИЕ
1 На осях, используемых для EGB, позиционирования шпинделя, деления поворотно-делительного стола, управления осью PMC, жесткого нарезания резьбы метчиком и т. д., установите данный параметр на 0 (Не совпадает с усилением в контуре контроля контуров Cs).
2 При вводе осей, к которым применяется интерполяция с осью контроля контуров Cs, с помощью параметра № 39n0 (n = 0–4), присвойте этому параметру значение 0.
3 При выборе автоматического усиления позиции во время переключения контроля контуров Cs посредством выставления биту 7 (ALG) параметра № 1814 значения 1 задайте всем параметрам № 39n0 (n = 0–4) значение 0.
№7 №6 №5 №4 №3 №2 №1 №0
RONx | APCx | APZx | DCRx | DCLx | OPTx | RVSx |
1815
RONx | APCx | APZx | DCRx | DCLx | OPTx | RVSx |
[Тип ввода] Ввод параметров [Тип данных] Бит оси
ПРИМЕЧАНИЕ
При настройке любого из данных параметров отключите питание, прежде чем продолжить работу.
№0 RVSx При использовании шкалы без данных о вращении: 0: В ЧПУ не хранятся данные о вращении.
1: В ЧПУ хранятся данные о вращении.
Данный параметр начинает действовать, если выполняется любое из указанных ниже условий.
- Используется поворотная ось (тип B) и диапазон доступных перемещений превышает один оборот.
- Бит 6 (RVLx) параметра № 11802 равен 1.
ПРИМЕЧАНИЕ
1 Для поворотной оси (типа B) с диапазоном доступных перемещений больше одного оборота рекомендуется использовать шкалу вращения с данными о вращении. В противном случае значение координат станка может превысить один оборот, например, при вращении больше чем на 180 градусов в отключенном состоянии.
2 Данный параметр доступен для поворотной оси (типа B) или для оси, у которой бит 6 (RVLx) параметра № 11802 равен 1. Данный параметр доступен для оси с детектором абсолютного положения (импульсным шифратором), интерфейсом круговой шкалы с закодированным расстоянием (фаза A/B) или с круговой шкалой с закодированным расстоянием по исходным отметкам (последовательная передача).
![]()
B-64700RU/01 4. ОПИСАНИЕ ПАРАМЕТРОВ
ПРИМЕЧАНИЕ
3 Если этот параметр доступен, то значение координат станка сохраняется непосредственно перед отключением ЧПУ. В случае перемещения при отключении более чем на заданное значение или перед возвратом в исходную позицию значение координат станка может выйти за пределы одного оборота, т. к. ЧПУ сохраняет значение координат станка непосредственно перед выключением ЧПУ и при последующем включении использует данное значение.
На поворотной оси (типа B): более 180 градусов
На линейно оси:
1/4 от значения, заданного в параметре № 11810.
4 При изменении данного параметра теряется согласование позиции станка и детектора абсолютного положения. Поэтому задайте исходную позицию повторно. (бит 4 (APZx) параметра
№ 1815 равен 0 и выдается аварийный сигнал DS0300 «APC АВ.С: НЕОБХ.ВОЗВР.В ИСХ.Т». Причина, вызвавшая присвоение биту 4 (APZx) параметра № 1815 значения 0, указана в бите 0 данных диагностики № 0310).
5 Значение абсолютных координат задается значением координат станка. Однако после включения ЧПУ не задается смещение заготовки, например, G92 и G52, выполненных перед отключением ЧПУ.
6 Эту функцию нельзя использовать вместе с битом 3 (SCRx) параметра № 1817, который преобразовывает данные шкалы.
7 Если используется поворотная ось (тип B) и величина одного оборота поворотной оси составляет 360, задайте параметру
№ 1869 значение 0. Помимо этого, задайте параметру № 1240 значение 0, поскольку исходная позиция должна быть 0 градусов.
8 Если используется поворотная ось (тип B) и величина одного оборота поворотной оси не равна 360, задайте параметру
№ 1869 значение, равное величине одного оборота. Помимо этого, задайте параметру № 1240 значение 0, поскольку исходная позиция должна быть 0 градусов.
9 Если используется линейная ось, задайте параметру № 11810 величину перемещения за один оборот двигателя.
10 Данный параметр нельзя использовать вместе с проверкой сохраненного ограничения хода немедленно после включения питания (бит 0 (DOTx) параметра № 1311 равен 1).
![]()
4. ОПИСАНИЕ ПАРАМЕТРОВ B-64700RU/01
№1 OPTx Детектор отдельного положения:
0: Не будет использоваться (полузамкнутая система) 1: Будет использоваться (замкнутая система)
ПРИМЕЧАНИЕ
1 При использовании детектора абсолютного положения
(бит 5 (APCx) параметра № 1815 равен 1) установите указанные ниже параметры, соответствующие используемому детектору абсолютного положения.
- Биты 6 и 0 параметра № 1815, бит 3 параметра № 1817,
параметр № 1868, бит 1 параметра № 2275, параметр
№ 2394
Если данные параметры заданы неправильно, при включении координаты станка не будут установлены правильно.
2 Задайте данному параметру значение 1 при использовании линейной шкалы с исходными отметками или линейной шкалы с исходными метками с закодированным расстоянием
(замкнутая система).
#№2 DCLx В качестве отдельного детектора положения линейная шкала с исходными отметками или линейная шкала с нулевой точкой с абсолютным адресом:
0: Не используется.
1: Используется.
№3 DCRx В качестве шкалы с исходными отметками с абсолютным адресом:
0: Не используется угловой энкодер с исходными отметками с абсолютным адресом.
1: Используется угловой энкодер с исходными отметками с абсолютным адресом.
ПРИМЕЧАНИЕ
При использовании углового угловой энкодер с исходными отметками также присвойте биту 2 (DCLx) параметра № 1815 значение 1.
№4 APZx Если используется детектор абсолютного положения, то положение станка и положение детектора абсолютного положения:
0: Не соответствуют друг другу 1: Соответствуют друг другу
При использовании датчика абсолютного положения после выполнения основной регулировки или после замены датчика абсолютного положения данный параметр следует установить на 0, выключить и повторно включить питание, а затем выполнить ручной возврат в исходную позицию. Это завершает сопоставление положения станка и датчика абсолютного положения и автоматически устанавливает данный параметр на 1.
![]()
B-64700RU/01 4. ОПИСАНИЕ ПАРАМЕТРОВ
№5 APCx Детектор положения
0: Не является детектором абсолютного положения 1: Является детектором абсолютного положения
(импульсный шифратор)
ПРИМЕЧАНИЕ
1 При использовании импульсного шифратора FANUC в качестве детектора абсолютного положения поворотной оси (типа A) с округлением координат станка от 0 до 360° задайте биту 6 (RONx) параметра № 1815 значение 0. Если параметр задан неправильно, при включении координаты станка не будут установлены правильно.
2 При использовании в качестве детектора абсолютного положения поворотной шкалы без сторонних данных о вращении см. раздел «Соответствие поворотной шкалы без данных о вращении» в Руководстве по выполнению соединений (функциональная часть)(B-64693EN-1). Выставьте значение, соответствующее детектору. Если параметр задан неправильно, при включении координаты станка не будут установлены правильно.
3 Если ось серводвигателя отключена (бит 4 (KSVx) параметра
№ 11802 равен 1), детектор абсолютного положения нельзя использовать (биту 5 (APCx) параметра № 1815 нельзя присвоить значение 1). При использовании детектора абсолютного положения выдается аварийный сигнал SV0301 APC ALARM; COMMUNICATION ERROR.
№6 RONx С поворотной оси (тип A) детектор абсолютного положения (импульсный шифратор), использующий шкалу без данных о вращении:
0: Не используется.
1: Используется.
ПРИМЕЧАНИЕ
1 Данный параметр доступен только для поворотной оси (типа A) с детектором абсолютного положения (импульсный шифратор). Данную функцию нельзя использовать с поворотной шкалой с исходными отметками с закодированным расстоянием (последовательная связь) или с интерфейсом круговой шкалы с закодированным расстоянием (фаза A/B).
2 Присвойте данному параметру значение 1 для поворотной оси (тип A), использующей поворотную шкалу без данных о вращении, например, поворотная шкала HEIDENHAIN RCN 223F, 727F, и т. д.
В остальных случаях присвойте данному параметру значение
0. Если параметр задан неправильно, при включении координаты станка не будут установлены правильно.
![]()
4. ОПИСАНИЕ ПАРАМЕТРОВ B-64700RU/01
ПРИМЕЧАНИЕ
3 Если этот параметр задан, теряется согласование позиции станка и позиции детектора абсолютного положения. Поэтому задайте исходную позицию повторно. (соответственно, биту 4 (APZx) параметра № 1815 (указывающему на установление соответствия) присваивается значение 0; аварийный сигнал DS0300 «APC АВ.С: НЕОБХОДИМ ВОЗВРАТ НА
РЕФЕРЕНТНУЮ ПОЗИЦИЮ». Причину присвоения биту 4 (APZx) параметра № 1815 значения 0 можно проверить по биту 0 данных диагностики № 0310).
№7 №6 №5 №4 №3 №2 №1 №0
DM3x | DM2x | DM1x | HPEx |
1816
DM3x | DM2x | DM1x | HPEx |
[Тип ввода] Ввод параметров [Тип данных] Бит оси
ПРИМЕЧАНИЕ
При настройке любого из данных параметров отключите питание, прежде чем продолжить работу.
№2 HPEx Величина компенсации погрешности можно вывести в качестве: 0: Единицы обнаружения
1: 1/1000 от единицы обнаружения (единица нанокомпенсации)
ПРИМЕЧАНИЕ
1 Данный параметр действителен для следующего компенсации погрешностей:
- Плавная компенсация мертвого хода
- Коррекция прямолинейности по интерполяции
- Коррекция прямолинейности по интерполяции по 3072 точкам
- Коррекция на погрешности шага по интерполяции
2 При компенсации погрешностей задайте данные компенсации, например, данные коррекции на погрешности шага в единицах обнаружения, независимо от настройки данного параметра.
3 Данный параметр действителен на следующих осях.
- Ось серводвигателя
- Ось, на которой используется контроль контуров Cs или позиционирование шпинделя
4 Если данный параметр имеет значение 1, величину компенсации после компенсации погрешностей можно вывести на основании единицы измерения.
- Коррекция мертвого хода
- Сохраненная коррекция на погрешности шага
- Коррекция прямолинейности
- Коррекция наклона
- Двунаправленная коррекция на погрешности шага
5 Для использования данного параметра требуется программное обеспечение с поддержкой данного параметра.
![]()
B-64700RU/01 4. ОПИСАНИЕ ПАРАМЕТРОВ
№4 DM1x
№5 DM2x
№6 DM3x При помощи DM1x, DM2x и DM3x задается множитель обнаружения (DMR).
Данный параметр действителен, если используется отдельный детектор положения (фаза AB) и не установлены параметры
№ 2084 и 2085.
DM3x | DM2x | DM1x | DMR |
0 | 0 | 0 | 1/2 |
0 | 0 | 1 | 1 |
0 | 1 | 0 | 3/2 |
0 | 1 | 1 | 2 |
1 | 0 | 0 | 5/2 |
1 | 0 | 1 | 3 |
1 | 1 | 0 | 7/2 |
1 | 1 | 1 | 4 |
№7 №6 №5 №4 №3 №2 №1 №0
TANx | SCPx | SCRx | SBLx |
1817
TANx | SCPx | SCRx | SBLx |
[Тип ввода] Ввод параметров [Тип данных] Бит оси
ПРИМЕЧАНИЕ
При настройке любого из данных параметров отключите питание, прежде чем продолжить работу.
№2 SBLx Плавная компенсация мертвого хода: 0: Откл.
1: Вкл.
№3 SCRx Задает необходимость преобразования данных шкалы с использованием порогового положения (параметр № 1868) с тем, чтобы была доступна поворотная ось (типа B). В случае оси типа B, для которой используется поворотная шкала без данных (количество оборотов) и диапазон перемещения которой меньше одного оборота:
0: Преобразование не выполняется. 1: Преобразование выполняется.
ПРИМЕЧАНИЕ
1 Этот параметр доступен только для поворотной оси (типа B) с датчиком абсолютного положения (импульсный шифратор) или поворотной шкалы с исходными отметками с закодированным расстоянием (последовательная связь). Эту функцию нельзя использовать с интерфейсом поворотной шкалы с закодированным расстоянием (фаза A/B).
2 Не устанавливайте этот параметр, если в пределах диапазона перемещения поворотной оси отсутствует непрерывная точка, даже для поворотной оси (типа B).
![]()
4. ОПИСАНИЕ ПАРАМЕТРОВ B-64700RU/01
ПРИМЕЧАНИЕ
3 Если этот параметр задан, теряется согласование позиции станка и позиции детектора абсолютного положения. Поэтому задайте исходную позицию повторно. (соответственно, биту 4 (APZx) параметра № 1815 (указывающему на установление соответствия) присваивается значение 0; аварийный сигнал DS0300 «APC АВ.С: НЕОБХОДИМ ВОЗВРАТ НА
РЕФЕРЕНТНУЮ ПОЗИЦИЮ». Причину присвоения биту 4 (APZx) параметра № 1815 значения 0 можно проверить по биту 0 данных диагностики № 0310).
4 Эту функцию нельзя использовать вместе с битом 0 (RVSx) параметра № 1815, который сохраняет данные о вращении с помощью ЧПУ.
5 В этой функции величина одного оборота поворотной оси считается 360, а в качестве исходной позиции принимается положение станка на 0. Применить к поворотной оси иные настройки невозможно.
6 Задайте параметру № 1240 значение 0.
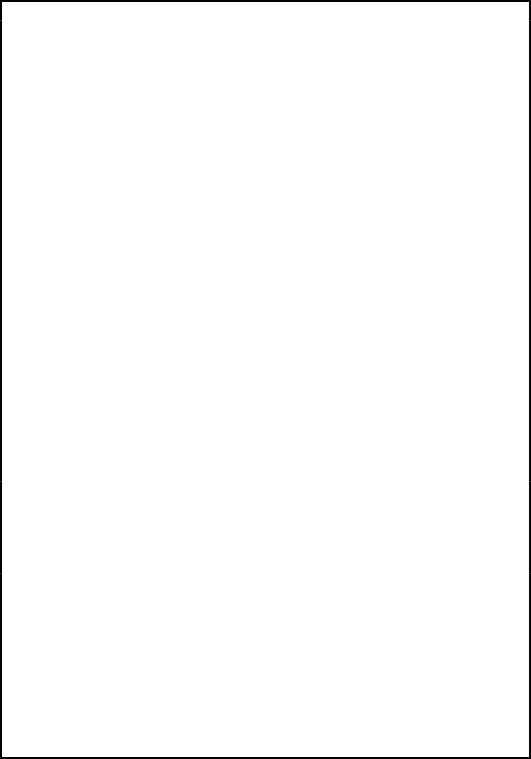
#4 SCPx Для измерения по двум точкам (если бит 2 (DC2x) параметра
№ 1802 равен 1), направление нулевой точки шкалы находится: 0: На отрицательной стороне (исходная позиция располагается
на положительной стороне при взгляде со стороны нулевой точки шкалы).
![]()
![]()
● Если параметр SCPx = 0
● Если параметр SCPx = 0
● Если параметр SCPx = 0
Отметка 1 =
Отметка 2
Отметка 1 =
Отметка 2
Отметка 1 =
Отметка 2
Отметка 1 Отметка 2
Отметка 1 Отметка 2
Отметка 1 Отметка 2
Отметка 1
Отметка 1
Отметка 1
Отметка 1 Отметка 2 Отметка 1 Отметка 2 Отметка 1Отметка 2 Отметка 1
Отметка 1 Отметка 2 Отметка 1 Отметка 2 Отметка 1Отметка 2 Отметка 1
Отметка 1 Отметка 2 Отметка 1 Отметка 2 Отметка 1Отметка 2 Отметка 1
0,020
0,020
0,020
0,040
0,040
0,040
9,940
9,940
9,940
9,960
9,960
9,960
9,980
9,980
9,980
Нулевая точка шкалы
-
Нулевая точка шкалы
-
Нулевая точка шкалы
-
Система координат станка
Система координат станка
Система координат станка
+
+
+
Исходная позиция
Исходная позиция
Исходная позиция
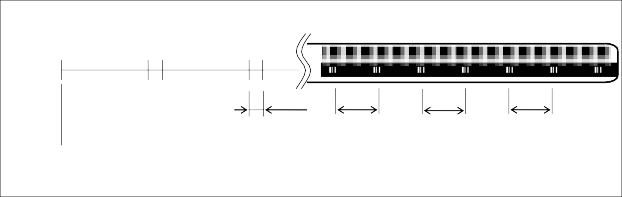
1: На положительной стороне. (исходная позиция располагается на отрицательной стороне при взгляде со стороны нулевой точки шкалы).
ПРИМЕЧАНИЕ
1 Этот параметр действителен, если бит 2 (DC2x) параметра
№ 1802 равен 1.
2 При установке в этом параметре неправильного значения устанавливается неверная система координат. В таком случае верните предыдущую установку, а затем повторно выполните операцию создания исходной позиции.
![]()
![]()
![]()
● Если параметр SCPx = 1
● Если параметр SCPx = 1
● Если параметр SCPx = 1
Отметка 1 =
Отметка 2
Отметка 1 =
Отметка 2
Отметка 1 =
Отметка 2
Отметка Отметка 2
Отметка Отметка 2
Отметка Отметка 2
Отметка 1
Отметка 1
Отметка 1
Отметка 1 Отметка 2Отметка 1 Отметка 2Отметка 1 Отметка 2 Отметка 1
Отметка 1 Отметка 2Отметка 1 Отметка 2Отметка 1 Отметка 2 Отметка 1
Отметка 1 Отметка 2Отметка 1 Отметка 2Отметка 1 Отметка 2 Отметка 1
0,020
0,020
0,020
0,040
0,040
0,040
9,940
9,940
9,940
9,960
9,960
9,960
9,980
9,980
9,980
Нулевая точка шкалы
+
Нулевая точка шкалы
+
Нулевая точка шкалы
+
Система координат станка
Система координат станка
Система координат станка
-
-
-
Исходная позиция
Исходная позиция
Исходная позиция
B-64700RU/01 4. ОПИСАНИЕ ПАРАМЕТРОВ
№6 TANx Каскадное управление
0: Не используется
1: Используется
ПРИМЕЧАНИЕ
Задавайте этот параметр как для ведущей, так и для ведомой оси.
№7 №6 №5 №4 №3 №2 №1 №0
APDx | SDCx | DG0x | RF2x | RFSx |
1818
APDx | SDCx | DG0x | RF2x | RFSx |
[Тип ввода] Ввод параметров [Тип данных] Бит оси
№0 RFSx Если G28 задан для оси без созданной исходной позиции (сигнал создания исходной позиции ZRFx <от Fn120.0 до 7> = 0), когда используется линейная шкала с абсолютным адресом нулевой точки или линейная шкала с абсолютными адресами исходных меток:
0: Перемещение производится на исходную позицию после операции создания исходной позиции.
1: Никакого перемещения не производится после операции создания исходной позиции, но операция завершается.
ПРИМЕЧАНИЕ
Этот параметр выключает перемещение в исходную позицию по команде G28. Поэтому используйте этот параметр только в особых случаях.
№1 RF2x Если G28 задан для оси с уже созданной исходной позицией (сигнал создания исходной позиции ZRFx <от Fn120.0 до 7> = 1), когда используется линейная шкала с абсолютным адресом нулевой точки или линейная шкала с абсолютными адресами исходных меток:
0: Выполняется перемещение в исходную позицию.
1: Никакого перемещения не производится в промежуточное положение и исходную позицию, но операция завершается.
![]()
4. ОПИСАНИЕ ПАРАМЕТРОВ B-64700RU/01
ПРИМЕЧАНИЕ
Этот параметр выключает перемещение в исходную позицию по команде G28. Поэтому используйте этот параметр только в особых случаях.
№2 DG0x Если используется функция линейной шкалы с абсолютными адресами исходных отметок, то операция создания исходной позиции командой G00 и толчковой подачей:
0: Откл.
1: Вкл.
№3 SDCx Линейная шкала с абсолютным адресом нулевой точки: 0: Не используется.
1: Используется.
ПРИМЕЧАНИЕ
1 При настройке параметра SDCx отключите питание, прежде чем продолжить работу. Аварийный сигнал PW0000
«ПИТАНИЕ НАДО ОТКЛ» не срабатывает.
2 Для замкнутой системы установите бит 1 (OPTx) параметра ном. 1815 на 1. В системе с двигателем линейного перемещения присвойте этому параметру значение 0.
№5 APDx На оси с детектором абсолютного положения (импульсный шифратор), когда ось выходит из состояния отключения управляемой оси:
0: Бит 4 (APZx) параметра № 1815 автоматически изменяет значение на 0 и срабатывает аварийный сигнал DS0300.
![]()
ПРЕДУПРЕЖДЕНИЕ!
1 Отключение и подключение управляемой оси необходимо производить на одной оси (и одном детекторе). Не изменяйте ось и т. д.
2 При отключении управляемой оси запрещается перемещать поворотную ось (типа A) (округление координат станка от
0 до 360°) больше чем на 180°.
3 При использовании функции отключения управляемой оси в автоматическом режиме измените сигналы отключения управляемой оси с DTCH1 по DTCH8 <Gn124> в состоянии ожидания FIN с помощью M-кода без буферизации (параметры № 3411–3432).
4 Если используется обнаружение магнитного полюса, то его необходимо выполнить при повторном присоединении отключенной управляемой оси.
1: Бит 4 (APZx) параметра № 1815 не изменяется. После выхода из состояния отключения управляемой оси детектор абсолютного положения (импульсный шифратор) автоматически настраивает системы координат станка и заготовки.
![]()
B-64700RU/01 4. ОПИСАНИЕ ПАРАМЕТРОВ
№7 №6 №5 №4 №3 №2 №1 №0
DATx | CRFx | FUPx |
1819
DATx | CRFx | FUPx |
[Тип ввода] Ввод параметров [Тип данных] Бит оси
№0 FUPx Для выполнения слежения, когда серводвигатель отключен на каждой оси.
0: Сигнал слежения *FLWU<Gn007.5>, определяет выполнение слежения.
Если *FLWU<Gn007.5> равен 0, слежение производится. Если *FLWU<Gn007.5> равен 1, слежение не производится.
1: Слежение не производится.
ПРИМЕЧАНИЕ
При использовании функции деления делительно-поворотного стола установите FUPx на 1 для оси управления, предназначенной для деления делительно-поворотного стола.
№1 CRFx При выдачи аварийного сигнала SV0445 «АВ.С.РАЗЪЕД. ПРОГ.ОБ.», SV0447 «РАЗЪЕДИНЕНИЕ (ВНЕШ)» или SV0421
«ОШИБКА ИЗБЫТ(ПОЛУНАПОЛ)»:
0: Состояние созданной исходной позиции не затрагивается. 1: Принимается состояние несозданной исходной позиции
(бит 4 (APZx) параметра№ 1815 установлен на 0).
№2 DATx Если используется линейная шкала с абсолютным адресом нулевой точки или линейная шкала с абсолютным адресом исходных отметок, то автоматическая настройка параметров
№ 1883 и 1884 во время ручного возврата на исходную позицию: 0: Не выполняется
1: Выполняется.
Процедура автоматической настройки следующая:
<1> Задайте подходящее значение параметрам № 1815, 1821 и 1882 (если используется линейная шкала с исходными отметками с закодированным расстоянием (последовательная связь), то настраивать параметр № 1882 не требуется).
<2> Вручную установите станок на исходную позицию.
<3> Присвойте данному параметру значение 1.
Появится аварийный сигнал PS5220 «РЕЖИМ РЕГУЛ.Т.ОТСЧЕТА».
<4> Выполните ручной возврат в исходную позицию. После завершения ручного возврата на исходную позицию задаются параметры № 1883 и 1884, а этот параметр автоматически получает значение 0.
Выполните сброс, чтобы отключить аварийный сигнал PS5220.
![]()
4. ОПИСАНИЕ ПАРАМЕТРОВ B-64700RU/01
1820
Множитель команды для каждой оси (CMR)
ПРИМЕЧАНИЕ
При настройке данного параметра отключите питание, прежде чем продолжить работу.
[Тип ввода] Ввод параметров [Тип данных] Байт ось
[Действительный диапазон данных] См. ниже:
Задает множитель для команды, указывающий на отношение дискретности отработки перемещений к единице обнаружения по каждой оси.
Дискретность отработки перемещений = единица обнаружения
множитель команды
Взаимосвязь между системой приращений и дискретностью отработки перемещений
Имя системы приращений | Дискретность задания перемещений | Дискретность отработки перемещений | Максимальная длина хода | |||
IS-A | 0,01 | мм | 0,01 | мм | 999999,99 | мм |
0,001 | дюйм | 0,001 | дюйм | 99999,999 | дюйм | |
0,01 | град. | 0,01 | град. | 999999,99 | град. | |
IS-B | 0,001 | мм | 0,001 | мм | 999999,999 | мм |
0,0001 | дюйм | 0,0001 | дюйм | 99999,9999 | дюйм | |
0,001 | град. | 0,001 | град. | 999999,999 | град. | |
IS-C | 0,0001 | мм | 0,0001 | мм | 99999,9999 | мм |
0,00001 | дюйм | 0,00001 | дюйм | 9999,99999 | дюйм | |
0,0001 | град. | 0,0001 | град. | 99999,9999 | град. | |
Если бит 7 (IPR) параметра № 1004, который умножает ввод приращений на 10, равен 1 и значение введено без десятичной запятой, то введенные значения во всех системах приращений изменяются следующим образом.
Имя системы приращений | Дискретность задания перемещений | Дискретность отработки перемещений | Максимальная длина хода | |||
IS-B | 0,01 | мм | 0,001 | мм | 999999,999 | мм |
0,001 | дюйм | 0,0001 | дюйм | 99999,9999 | дюйм | |
0,01 | град. | 0,001 | град. | 999999,999 | град. | |
IS-C | 0,001 | мм | 0,0001 | мм | 99999,9999 | мм |
0,0001 | дюйм | 0,00001 | дюйм | 9999,99999 | дюйм | |
0,001 | град. | 0,0001 | град. | 99999,9999 | град. | |
ПРИМЕЧАНИЕ
Единица (мм или дюйм) в таблице используется для указания значения диаметра при программировании диаметра (если бит 3 (DIAx) параметра № 1006 имеет значение 1) или значения радиуса при программировании радиуса.
![]()
B-64700RU/01 4. ОПИСАНИЕ ПАРАМЕТРОВ
Импульс команды
Импульс команды
Импульс команды
+
+
+
Дискретность отработки перемещений
Дискретность отработки перемещений
Дискретность отработки перемещений
CMR
CMR
CMR
-
-
-
Счетчик ошибок
Счетчик ошибок
Счетчик ошибок
ЦА К управлению преобразователь скоростью
ЦА К управлению преобразователь скоростью
ЦА К управлению преобразователь скоростью
Исходный счетчик
Исходный счетчик
Исходный счетчик
Единица обнаружения
Единица обнаружения
Единица обнаружения
DMR
DMR
DMR
Импульс обратной связи
Импульс обратной связи
Импульс обратной связи
Датчик положения
Датчик положения
Датчик положения
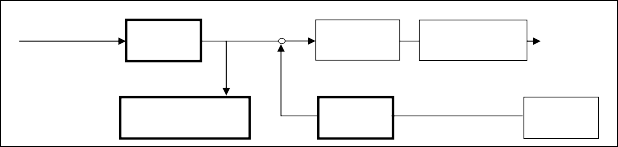
Настройка множителя команды (CMR), множителя обнаружения (DMR) и емкости исходного счетчика
Задайте CMR и DMR так, чтобы вес импульса положительного ввода (команда ЧПУ) у счетчика ошибок соответствовал весу импульса отрицательного ввода (импульсы датчика обратной связи по положению).
[Дискретность отработки перемещений]/CMR= [Единица обнаружения]=
[Единица импульсов обратной связи]/DMR
[Дискретность отработки перемещений]
Минимальная единица команд, выданных системой ЧПУ станку
[Единица обнаружения]
Минимальная единица обнаружения положения станка
Единица импульсов обратной связи варьируется в зависимости от типа датчика.
[Единица импульсов обратной связи]= [Величина перемещения за оборот импульсного
шифратора]/[Число импульсов на оборот импульсного шифратора]
В качестве емкости исходного счетчика задайте интервал сетки для возврата в исходную позицию в методе перспективных сеток.
[Емкость исходного счетчика]=[Интервал сетки]/ [Единица обнаружения]
[Интервал сетки]=[Величина перемещения за один оборот импульсного шифратора]
Настройка множителя команды производится следующим образом:
(1) Если множитель команды находится в интервале от 1 до 1/27 Заданное значение = 1 / множитель команды + 100 Действительный диапазон данных: от 101 до 127
(2) Если множитель команды находится в интервале от 0,5 до 48 Заданное значение = 2 множитель команды Действительный диапазон данных: от 1 до 96
![]()
4. ОПИСАНИЕ ПАРАМЕТРОВ B-64700RU/01
ПРИМЕЧАНИЕ
Если используется скорость подачи, превышающая скорость подачи, рассчитанную по выражению ниже, можно получить неверную величину перемещения или может сработать аварийный сигнал серводвигателя. Обязательно используйте скорость подачи, не превышающую скорость подачи, рассчитанную по следующему выражению:
Fmax [мм/мин] = 196 602 10 4 дискретность отработки перемещений / CMR
1821
Емкость исходного счетчика для каждой оси
ПРИМЕЧАНИЕ
При настройке данного параметра отключите питание, прежде чем продолжить работу.
[Тип ввода] Ввод параметров [Тип данных] Двойное слово оси
[Единица данных] Единица обнаружения [Действительный диапазон данных] от 0 до 999999999
Задает емкость исходного счетчика.
В качестве емкости исходного счетчика задайте интервал сетки для возврата на исходную позицию на основании метода перспективных сеток.
Если задано значение меньше 0, принимается значение, равное 10000.
Если используется линейная шкала с абсолютным адресом исходных отметок, задайте интервал отметки 1.
1825
Усиление контура сервосистемы для каждой оси
[Тип ввода] Ввод параметров [Тип данных] Слово оси
[Единица измерения данных] 0,01/с [Действительный диапазон данных] от 1 до 32767
Задает усиление контура для контроля положения для каждой оси.
Если станок выполняет линейную и круговую интерполяцию (резку), для всех осей должно быть установлено одинаковое значение. Если для станка необходимо только позиционирование, задаваемые значения осей могут отличаться. При повышении усиления контура улучшается реакция контроля положения. Однако слишком большое усиление контура повышает нестабильность сервосистемы.
Связь между отклонением позиционирования (число импульсов, полученных счетчиком ошибок) и скоростью подачи выражается следующим образом:
Отклонение позиционирования = скорость подачи / (60 усиление контура)
Единица измерения: Отклонение позиционирования: мм, дюймы или град.
Скорость подачи: мм/мин, дюйм/мин, или град/мин Усиление контура: 1/сек
![]()
B-64700RU/01 4. ОПИСАНИЕ ПАРАМЕТРОВ
ПРИМЕЧАНИЕ
Данный параметр используется при начальной настройке. Подробная информация приводится в приложении
«Автоматическая настройка и начальная настройка параметров» в Руководстве по выполнению соединений (функциональная часть) (B-64693EN-1).
1826
Ширина заданного положения для каждой оси
[Тип ввода] Ввод параметров [Тип данных] Двойное слово оси
[Единица данных] Единица обнаружения [Действительный диапазон данных] от 0 до 99999999
Величина шага позиционирования задается для каждой оси.
Если отклонение положения станка от заданного положения (абсолютное значение отклонения позиционирования) меньше, чем ширина заданного положения, предполагается, что станок вышел в заданное положение (станок находится в заданном положении).
1827
Ширина заданного положения при рабочей подачи для каждой оси
[Тип ввода] Ввод параметров [Тип данных] Двойное слово оси
[Единица данных] Единица обнаружения [Действительный диапазон данных] от 0 до 99999999
Устанавливает ширину заданного положения при рабочей подаче для каждой оси. Этот параметр используется, когда бит 4 (CCI) параметра № 1801 = 1
1828
Предел отклонения позиционирования для каждой оси при перемещении
[Тип ввода] Ввод параметров [Тип данных] Двойное слово оси
[Единица данных] Единица обнаружения [Действительный диапазон данных] от 0 до 99999999
Задает предел отклонения позиционирования при перемещении на каждой оси.
Если отклонение позиционирования превышает предел отклонения позиционирования в течение перемещения, срабатывает аварийный сигнал сервосистемы (SV0411)
«ОШИБКА ИЗБЫТ(ПЕРЕМЕЩ)» и работа немедленно прекращается (как при аварийном останове).
Setting valu
Setting valu
Setting valu
Rapid traverse rate(Note1)
Rapid traverse rate(Note1)
Rapid traverse rate(Note1)
60 Servo loop gain (Note 2)
60 Servo loop gain (Note 2)
60 Servo loop gain (Note 2)
Detection unit
Detection unit
Detection unit
1.2 to 1.5
1.2 to 1.5
1.2 to 1.5
![]()
Величина быстрого перемещения (Прим. 1)
Величина быстрого перемещения (Прим. 1)
Величина быстрого перемещения (Прим. 1)
настройкиe=60×Сервоусилитель петли (Прим. 2)
настройкиe=60×Сервоусилитель петли (Прим. 2)
настройкиe=60×Сервоусилитель петли (Прим. 2)
Значение
Значение
Значение
1,2...1,5
Единица регистрации
1,2...1,5
Единица регистрации
1,2...1,5
Единица регистрации
1
1
1
![]()
ВНИМАНИЕ!
Неправильная настройка данного параметра может повредить станок или заготовку.
В целом, задавайте в данном параметре отклонение позиционирования для ускоренного перемещения с запасом. См. приведенную ниже настройку.
![]()
4. ОПИСАНИЕ ПАРАМЕТРОВ B-64700RU/01
ПРИМЕЧАНИЕ
1 Обычно данное значение соответствует параметру № 1420. Если максимальная скорость подачи каждой оси превышает значение параметра № 1420, определяемое командой и коррекцией, то используется значение, соответствующее максимальной скорости подачи на каждой оси.
2 Обычно данное значение соответствует параметру № 1825. Если используется усиление контура сервосистемы не из параметра № 1825, то значение соответствует фактическому усилению контура сервосистемы.
1829
Предел отклонения позиционирования для каждой оси в состоянии останова
[Тип ввода] Ввод параметров [Тип данных] Двойное слово оси
[Единица данных] Единица обнаружения [Действительный диапазон данных] от 0 до 99999999
Задает предел отклонения позиционирования в состоянии останова на каждой оси.
Если в состоянии останова отклонение позиционирования превышает предел отклонения позиционирования, заданный для состояния останова, срабатывает аварийный сигнал сервосистемы SV0410 «ОШИБКА ИЗБЫТ.(СТОП)» и работа немедленно прекращается (как при аварийном останове).
1830
Предел отклонения позиционирования на каждой оси во время отключения сервосистемы
[Тип ввода] Ввод параметров [Тип данных] Двойное слово оси
[Единица данных] Единица обнаружения [Действительный диапазон данных] от 0 до 99999999
Этот параметр используется для установки предела отклонения позиционировании на каждой оси при отключении сервосистемы. Если значение, заданное в этом параметре, превышено во время отключения сервосистемы, выдается аварийный сигнал сервосистемы, приводящий к немедленному останову (как при аварийном останове). Задайте то же значение, что и для позиционного отклонения во время останова.
ПРИМЕЧАНИЕ
Если данный параметр равен 0, отклонение позиционирования не проверяется во время отключения сервосистемы.
![]()
B-64700RU/01 4. ОПИСАНИЕ ПАРАМЕТРОВ
1836
Величина погрешности сервосистемы, при которой возможен возврат на исходную позицию
[Тип ввода] Ввод параметров [Тип данных] Слово оси
[Единица данных] Единица обнаружения [Действительный диапазон данных] от 0 до 32767
Данный параметра задает погрешность сервопривода, используемую для активации возврата в исходное положение.
Обычно следует задавать этому параметру значение 0 (Если задано 0, значением по умолчанию принимается 128).
Если величина погрешности никогда не превышает значение данного параметра перед отходом от концевого выключателя для возврата в исходную позицию с замедлением, срабатывает аварийный сигнал (PS0090) «ВОЗВРАЩ.Т.ОТСЧЕТА НЕ ЗАВЕРШ».
1838
![]()
1842
![]()
Данные параметры связаны с системой двойной проверки безопасности.
Подробная информация приведена в «Руководстве по подключению системы двойной проверки безопасности» (B-64483EN-2).
1844
Расстояние до первой точки сетки, если величина сдвига исходной позиции в функции сдвига исходной позиции равна 0 или если возврат в исходную позицию выполняется сдвигом сетки
ПРИМЕЧАНИЕ
При настройке данного параметра отключите питание, прежде чем продолжить работу.
[Тип ввода] Ввод параметров [Тип данных] Двойное слово оси
[Единица данных] Единица обнаружения [Действительный диапазон данных] от -999999999 до 999999999
(1) Если включена функция сдвига исходной позиции (если бит 4 (SFDx) параметра № 1008 имеет значение 1)
Задает расстояние (единица обнаружения) до первой точки сетки от точки, в которой отключается упор замедления, если сдвиг исходной позиции (параметр № 1850) выставлен на 0.
(2) Если возврат в исходную позицию выполняется сдвигом сетки с установкой и не задана исходная позиция без упоров (если бит 4 (SFDx) параметра№ 1008 равен 0, а бит 1 (DLZx)
параметра № 1005 равен 0)
Задает расстояние до первой точки сетки от точки, в которой отключается упор замедления. (Единица обнаружения)
(3) Если возврат в исходную позицию выполняется сдвигом сетки и исходная позиция без упоров задана (если бит 4 (SFDx) параметра № 1008 равен 0, а бит 1 (DLZx) параметра
№ 1005 равен 1)
Задает расстояние от начального положения установки исходной позиции без упоров до первой точки сетки. (Единица обнаружения)
![]()
4. ОПИСАНИЕ ПАРАМЕТРОВ B-64700RU/01
ПРИМЕЧАНИЕ
1 Если включена функция сдвига исходной позиции (если бит 4 (SFDx) параметра № 1008 равен 1)
Если бит 4 (SFDx) параметра № 1008 равен 1, то расстояние от точки, в которой отключается упор замедления, до первой точки сетки (параметр № 1844) устанавливается на 0 и сдвиг исходной позиции (параметр № 1850) устанавливается на 0; ручной возврат в исходную позицию позволяет настроить данный параметр автоматически. Запрещается изменять автоматически установленное значение.
2 Если возврат в исходную позицию выполняется сдвигом сетки с установкой и не задана исходная позиция без упоров (если бит 4 (SFDx) параметра№ 1008 равен 0, а бит 1 (DLZx) параметра
№ 1005 равен 0)
Если выполняется ручной возврат в исходную позицию без упоров замедления, данный параметр устанавливается автоматически.
3 Если возврат в исходную позицию выполняется сдвигом сетки и исходная позиция без упоров задана (если бит 4 (SFDx) параметра № 1008 равен 0, а бит 1 (DLZx) параметра № 1005
равен 1)
Если настроен возврат в исходную позицию без упоров замедления, данный параметр устанавливается автоматически.
1846
Расстояние для запуска второго этапа плавной коррекции мертвого хода
[Тип ввода] Ввод параметров [Тип данных] Двойное слово оси
[Единица данных] Единица обнаружения [Действительный диапазон данных] от 0 до 999999999
Задает расстояние от точки, где направление перемещения по оси меняется на обратное, до точки, где запускается второй этап плавной коррекции мертвого хода, на каждой оси.
Плавная коррекция мертвого хода отключается, если не выполняются приведенные ниже условия:
Значение параметра № 1846 0
Значение параметра № 1846 значения параметра № 1847
1847
Расстояние для окончания второго этапа плавной коррекции мертвого хода
[Тип ввода] Ввод параметров [Тип данных] Двойное слово оси
[Единица данных] Единица обнаружения [Действительный диапазон данных] от 0 до 999999999
Задает расстояние от точки, где направление перемещения по оси меняется на обратное, до точки, где заканчивается второй этап плавной коррекции мертвого хода, на каждой оси.
Плавная коррекция мертвого хода отключается, если не выполняются приведенные ниже условия:
Значение параметра № 1846 0
Значение параметра № 1846 значения параметра № 1847
![]()
B-64700RU/01 4. ОПИСАНИЕ ПАРАМЕТРОВ
1848
Значение первого этапа плавной коррекции мертвого хода
[Тип ввода] Ввод параметров [Тип данных] Слово оси
[Единица данных] Единица обнаружения [Действительный диапазон данных] от -9999 до 9999
Задает значение первого этапа плавной коррекции мертвого хода для каждой оси.
Если настройка этого параметра больше, чем общая величина коррекции мертвого хода, то плавная коррекция мертвого хода не выполняется.
Если установлено отрицательное значение коррекции мертвого хода на каждой оси (параметр № 1851), задайте данному параметру отрицательное значение. Если знак заданного значения этого параметра отличается от значения коррекции мертвого хода для каждой оси (параметр № 1851), коррекция выполняется, исходя из того, что значение первого этапа плавной коррекции мертвого хода равно 0.
1850
Сдвиг сетки и сдвиг исходной позиции для каждой оси
ПРИМЕЧАНИЕ
При настройке данного параметра отключите питание, прежде чем продолжить работу.
[Тип ввода] Ввод параметров [Тип данных] Двойное слово оси
[Единица данных] Единица обнаружения [Действительный диапазон данных] от -99999999 до 99999999
В данном параметре задается величина, на которую можно сдвинуть сетку, чтобы сдвинуть исходную позицию. Величина сдвига сетки ограничена максимальным значением, отсчитываемым исходным счетчиком.
Если бит 4 (SFDx) параметра № 1008 равен 0: Сетка смещается Если бит 4 (SFDx) параметра № 1008 равен 1: Смещается исходная точка
ПРИМЕЧАНИЕ
Для назначения исходной позиции без упоров можно использовать только функцию сдвига сетки (функция сдвига исходной позиции недоступна).
1851
Значение коррекции мертвого хода для каждой оси
[Тип ввода] Ввод параметров [Тип данных] Слово оси
[Единица данных] Единица обнаружения [Действительный диапазон данных] от -9999 до 9999
Задайте значение компенсации мертвого хода для каждой оси. Когда станок перемещается в направлении, противоположном направлению возврата в исходную позицию после включения питания, выполняется первая коррекция мертвого хода.
![]()
4. ОПИСАНИЕ ПАРАМЕТРОВ B-64700RU/01
1852
Значение коррекции мертвого хода, используемое при ускоренном перемещении для каждой оси
[Тип ввода] Ввод параметров [Тип данных] Слово оси
[Единица данных] Единица обнаружения [Действительный диапазон данных] от -9999 до 9999
Устанавливает значение коррекции мертвого хода, используемое при ускоренном перемещении для каждой оси (этот параметр действителен, если бит 4 (RBK) параметра № 1800 равен 1). Точность обработки можно повысить, изменив значение коррекции мертвого хода с учетом скорости подачи, рабочей подачи или ускоренного перемещения. Допустим, измеренный мертвый ход при рабочей подаче равен A, а измеренный мертвый ход при ускоренном перемещении равен B. Ниже приводится значение коррекции мертвого хода в зависимости от изменения скорости подачи (рабочей подачи или ускоренного перемещения) и изменения направления перемещения.
Изменение скорости подачи Изменение направления перемещения | Рабочая подача на рабочую подачу | Ускоренное перемещение на ускоренное перемещение | Ускоренное перемещение на рабочую подачу | Рабочая подача на ускоренное перемещение |
То же направление | 0 | 0 | | (-) |
Противоположное направление | A | B | (B+) | (B+) |
ПРИМЕЧАНИЕ
1 =(A-B)/2 (однако, если нецелое число, то = (A-(B-1)) / 2.)
2 Положительное или отрицательное направление значений коррекции определяется направлением перемещения.
1853
Допуск обратного импульса, определяющего направление перемещения оси при коррекции мертвого хода
[Тип ввода] Ввод параметров [Тип данных] Двойное слово оси
[Единица данных] Единица обнаружения [Действительный диапазон данных] от 0 до 999999999
Устанавливает допуск обратного импульса, определяющего направление перемещения оси при коррекции мертвого хода.
После присвоения параметру значения при изменении направления движения выдается импульс коррекции мертвого хода.
Если этот параметр установлен на 0, отключается функция с недействительной шириной полосы и производится коррекция мертвого хода при изменении направления перемещения.
![]()
B-64700RU/01 4. ОПИСАНИЕ ПАРАМЕТРОВ
1860
Значение 1 нулевой точки детектора абсолютного положения
1861
Значение 2 нулевой точки детектора абсолютного положения
1862
Значение 3 нулевой точки детектора абсолютного положения
ПРИМЕЧАНИЕ
При настройке данного параметра отключите питание, прежде чем продолжить работу.
[Тип ввода] Заблокированный параметр [Тип данных] Двойное слово оси
В параметрах с 1860 по 1862 задаются значения нулевой точки детектора абсолютного положения (связь исходной позиции со значением счетчика детектора абсолютного положения).
Параметры с 1860 по 1862 задаются автоматически ЧПУ, используя соответствие исходной позиции детектору абсолютного положения.
Параметры с 1860 по 1862 нельзя задать посредством ввода через MDI, FOCAS2, окно PMC или программированием параметра (G10).
данные нулевой точки детектора абсолютного положения можно восстановить и задать параметры с 1860 по 1862, введя параметр через подключенное устройство ввода-вывода или восстановив область SRAM системы загрузки.
При восстановлении данных нулевой точки детектора абсолютного положения необходимо учитывать следующее:
- После восстановления данных нулевой точки детектора абсолютного положения создайте их резервную для последующего восстановления.
- При замене двигателя или детектора данные нулевой точки детектора абсолютного положения восстановить невозможно. После замены задайте нулевую точку детектора абсолютного положения повторно.
- При восстановлении данных нулевой точки детектора абсолютного положения из другого станка нулевая точка детектора абсолютного положения задается неправильно. Запрещается использовать данные нулевой точки детектора абсолютного положения другого станка.
![]()
ПРЕДУПРЕЖДЕНИЕ!
Если нулевая точка детектора абсолютного положения не задана должным образом, система координат станка создается неправильно.
- При создании резервной копии данных нулевой точки детектора абсолютного положения без создания исходной позиции и ее восстановления из резервной копии после восстановления требуется настройка нулевой точки детектора абсолютного положения.
![]()
4. ОПИСАНИЕ ПАРАМЕТРОВ B-64700RU/01
1868
Граничное положение преобразования данных шкалы (для каждой оси)
ПРИМЕЧАНИЕ
При настройке данного параметра отключите питание, прежде чем продолжить работу.
[Тип ввода] Ввод параметров [Тип данных] Действительная ось
[Единица данных] градус (единица станка)
[Минимальная единица данных] Зависит от системы приращений используемых осей [Действительный диапазон данных] 0 или положительные значения в формате 9 знаков минимальной
единицы данных
(см. таблицу задания стандартных параметров (В)) (в системе приращений IS-B от 0,0 до +999999,999)
Если данные поворотной шкалы без данных о вращении больше, чем данные шкалы граничного положения (значение данного параметра), выполняется их преобразование в текущие данные в диапазоне перемещения посредством вычитания данных одного оборота. В качестве граничного положения должно быть задано значение координаты станка за пределами диапазона перемещения (угол от прерывистой точки). Если ось с этим параметром установлена на 0, то преобразование данных шкалы не выполняется.
ПРИМЕЧАНИЕ
1 Этот параметр доступен только для поворотной оси (типа B) с детектором абсолютного положения (импульсный шифратор) или поворотной шкалы с исходными отметками с закодированным расстоянием (последовательная связь), у которой бит 3 (SCRx) параметра № 1817 имеет значение 1.
2 Эту функцию нельзя использовать с интерфейсом поворотной шкалы с закодированным расстоянием (фаза A/B).
3 Не устанавливайте этот параметр, если в пределах диапазона перемещения поворотной оси отсутствует непрерывная точка, даже для поворотной оси (типа B).
4 Если этот параметр задан, теряется согласование позиции станка и позиции детектора абсолютного положения. Поэтому задайте исходную позицию повторно. (соответственно, биту 4 (APZx) параметра № 1815 (указывающему на установление соответствия) присваивается значение 0; аварийный сигнал DS0300 «APC АВ.С: НЕОБХОДИМ ВОЗВРАТ НА
РЕФЕРЕНТНУЮ ПОЗИЦИЮ». Такое рассогласование указано в бите 0 данных диагностики № 310 в качестве причины присвоения биту 4 (APZx) параметра № 1815 значения 0).
![]()
B-64700RU/01 4. ОПИСАНИЕ ПАРАМЕТРОВ
1869
Величина одного оборота на поворотной оси (типа B) (каждая ось)
ПРИМЕЧАНИЕ
При настройке данного параметра отключите питание, прежде чем продолжить работу.
[Тип ввода] Ввод параметров [Тип данных] Действительная ось
[Единица данных] градус (единица станка)
[Минимальная единица данных] Зависит от системы приращений используемых осей [Действительный диапазон данных] 0 или положительные значения в формате 9 знаков минимальной
единицы данных
(см. таблицу задания стандартных параметров (В)) (в системе приращений IS-B от 0,0 до +999999,999)
Обычно значение одного оборота поворотной оси равно 360, а позиция станка 0 является исходной позицией.
В этом случае данный параметр устанавливается на 0.
Например, когда данный параметр установлен на 523.000, то величина одного оборота составит 523,000 (при использовании IS-B). Данный параметр используется, если необходимо задать произвольное значение.
ПРИМЕЧАНИЕ
1 Этот параметр доступен только для поворотной оси (типа B) с детектором абсолютного положения (импульсный шифратор) или поворотной шкалы с исходными отметками с закодированным расстоянием (последовательная связь), у которой бит 3 (SCRx) параметра № 1817 имеет значение 1 или бит 0 (RVSx) параметра № 1815 имеет значение 1.
2 Если значение одного оборота поворотной оси равно 360, данный параметр устанавливается на 0. Если необходимо установить произвольное значение одного оборота поворотной оси, данному параметру необходимо присвоить значение, равное величине одного оборота.
3 Если этот параметр задан, теряется согласование позиции станка и позиции детектора абсолютного положения. Поэтому задайте исходную позицию повторно. (соответственно, биту 4 (APZx) параметра № 1815 (указывающему на установление соответствия) присваивается значение 0; аварийный сигнал DS0300 «APC АВ.С: НЕОБХОДИМ ВОЗВРАТ НА
РЕФЕРЕНТНУЮ ПОЗИЦИЮ». Такое рассогласование указано в бите 0 данных диагностики № 0310 в качестве причины присвоения биту 4 (APZx) параметра № 1815 значения 0).
4 Параметр № 1869 часто используется при диапазоне перемещения менее одного оборота (бит 3 (SCRx) параметра
№ 1817 равен 1) и диапазоне перемещения больше одного оборота (бит 0 (RVSx) параметра № 1815 равен 1).
5 При использовании интерфейса поворотной шкалы с закодированным расстоянием (фаза A/B) присвойте данному параметру значение 0.
![]()
4. ОПИСАНИЕ ПАРАМЕТРОВ B-64700RU/01
1874
Числитель передачи гибкой подачи для встроенного детектора положения
1875
Знаменатель передачи гибкой подачи для встроенного детектора положения
ПРИМЕЧАНИЕ
При настройке данных параметров отключите питание, прежде чем продолжить работу.
[Тип ввода] Ввод параметров [Тип данных] Слово оси
[Действительный диапазон данных] от 1 до 32767
При использовании временной настройки абсолютных координат задайте передачу гибкой подачи для встроенного детектора положения на каждой оси. Применяются следующие настройки:
No.1874
No.1874
No.1874
No.1875
No.1875
No.1875
Number of position feedback pulses per motor revolution
Number of position feedback pulses per motor revolution
Number of position feedback pulses per motor revolution
1,000,000
1,000,000
1,000,000
![]()
ном. 1874
ном. 1874
ном. 1874
![]()
ном. 1875
ном. 1875
ном. 1875
![]()
Число импульсов обратной связи по положению за оборот двигателя
Число импульсов обратной связи по положению за оборот двигателя
Число импульсов обратной связи по положению за оборот двигателя
![]()
1 000 000
1 000 000
1 000 000
![]() =
=
ПРИМЕЧАНИЕ
Если параметр № 1874 или 1875 равен 0, предполагается, что оба параметры равны 1.
1880
Таймер аварийного сигнала для обнаружения ненормальной нагрузки
[Тип ввода] Ввод параметров [Тип данных] Слово пути
[Единица данных] мс [Действительный диапазон данных] от 0 до 32767
Этот параметр устанавливает время от обнаружения непредвиденного возмущающего момента, до выдачи аварийного сигнала сервосистемы.
При этом, если данный параметр равен 0, используется значение 200 мс.
1881
Номер группы при обнаружении непредвиденного возмущающего момента
[Тип ввода] Ввод параметров [Тип данных] Байт ось
[Действительный диапазон данных] от 0 до 32
Задает номер группы на каждой оси при обнаружении непредвиденного возмущающего момента.
В случае обнаружения непредвиденного возмущающего момента на оси, останавливаются перемещения только на тех осях, которые относятся к одной группе.
Если для оси установлен 0, то перемещение на оси прекращается при обнаружении непредвиденного возмущающего момента на любой другой оси.
Этот параметр действителен, если бит 5 (ANA) параметра № 1804 имеет значение 1.
![]()
B-64700RU/01 4. ОПИСАНИЕ ПАРАМЕТРОВ
[Пример]
Если выполняются указанные ниже установки, то при обнаружении непредвиденного возмущающего момента на 6-й оси, то перемещения прекращаются на 2-й, 4-й, 6-й и 7-й оси. Если непредвиденный возмущающий момент обнаружен на 4-й оси, то перемещение прекращается на 4-й и 7-й оси.
Параметр № 1881 | Значение настройки |
(1-я ось) | 1 |
(2-я ось) | 2 |
(3-я ось) | 1 |
(4-я ось) | 0 |
(5-я ось) | 3 |
(6-я ось) | 2 |
(7-я ось) | 0 |
1882
Интервал метки 2 линейной шкалы с абсолютным адресом исходных меток
ПРИМЕЧАНИЕ
При настройке данного параметра отключите питание, прежде чем продолжить работу.
[Тип ввода] Ввод параметров [Тип данных] Двойное слово оси
[Единица данных] Единица обнаружения [Действительный диапазон данных] от 0 до 999999999
Задает интервал метки 2 линейной шкалы с абсолютным адресом исходных меток.
1883
Расстояние 1 от нулевой точки шкалы до исходной позиции (линейная шкала с абсолютными адресами исходных меток) или расстояние 1 от базисной точки до исходной позиции (линейная шкала с абсолютным адресом нулевой точки)
ПРИМЕЧАНИЕ
При настройке данного параметра отключите питание, прежде чем продолжить работу.
[Тип ввода] Ввод параметров [Тип данных] Двойное слово оси
[Единица данных] Единица обнаружения [Действительный диапазон данных] от -999999999 до 999999999
1884
Расстояние 2 от нулевой точки шкалы до исходной позиции (линейная шкала с абсолютными адресами исходных меток) или расстояние 2 от базисной точки до исходной позиции (линейная шкала с абсолютным адресом нулевой точки)
ПРИМЕЧАНИЕ
При настройке данного параметра отключите питание, прежде чем продолжить работу.
[Тип ввода] Ввод параметров [Тип данных] Двойное слово оси
[Единица данных] Единица обнаружения
![]()
4. ОПИСАНИЕ ПАРАМЕТРОВ B-64700RU/01
[Действительный диапазон данных] от -999 до 999
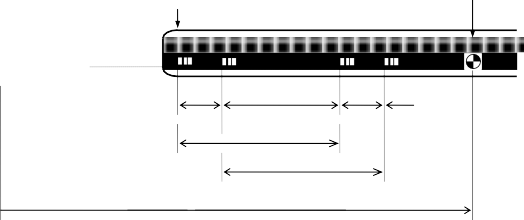
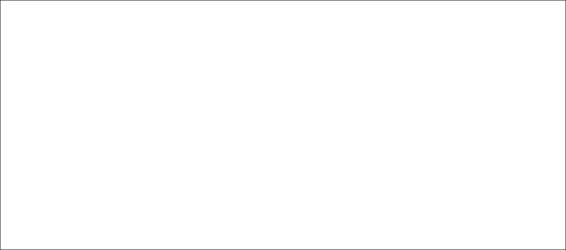
Если используется линейная шкала с абсолютным адресом исходных меток, задает расстояние от нулевая точка шкалы до исходной позиции в параметрах № 1883 и 1884.
Расстояние от нулевой точки до исходной позиции линейной шкалы= № 1884 1 000 000 000 + № 1883
Нулевая точка шкалы представляет собой точку, где совпадают отметки 1 и 2. Обычно эта точка является виртуальной и физически не присутствует на шкале. (см. Fig. 4.18 (a).)
![]()
![]()
Нулевая точка кодера Конец кодера
Нулевая точка кодера Конец кодера
Нулевая точка кодера Конец кодера
Исходная позиция
Исходная позиция
Исходная позиция
Отметка 1 Отметка 2
Отметка 1 Отметка 2
Отметка 1 Отметка 2
Отметка 1 Отметка 2
Отметка 1 Отметка 2
Отметка 1 Отметка 2
Отметка 1 =
Отметка 2
Отметка 1 =
Отметка 2
Отметка 1 =
Отметка 2
……..
……..
……..
8,0
8,0
8,0
42,0
42,0
42,0
8,2 41,8
8,2 41,8
8,2 41,8
PRM.1821
PRM.1882
PRM.1884 1,000,000,000 + PRM.1883
PRM.1821
PRM.1882
PRM.1884 1,000,000,000 + PRM.1883
PRM.1821
PRM.1882
PRM.1884 1,000,000,000 + PRM.1883
Если исходная позиция расположена в направлении «+» при взгляде с нулевой точки шкалы, задайте положительное значение. Если исходная позиция расположена в направлении «-» при взгляде с нулевой точки шкалы, задайте отрицательное значение.
Рис. 4.18 (a)
[Пример настройки параметров]

![]()
![]()
![]()
![]()
Нулевая точка шкалы Направление +
Нулевая точка шкалы Направление +
Нулевая точка шкалы Направление +
Исходная позиция
Исходная позиция
Исходная позиция
Направление -
Направление -
Направление -
A
A
A
B
B
B
Отметка 1 =
Отметка 2
Отметка 1 =
Отметка 2
Отметка 1 =
Отметка 2
Отметка 1 Отметка 2 Отметка 1
Отметка 1 Отметка 2 Отметка 1
Отметка 1 Отметка 2 Отметка 1
Отметка 1 Отметка 2 Отметка 1 Отметка 2 Отметка 1 Отметка 2 Отметка 1
Отметка 1 Отметка 2 Отметка 1 Отметка 2 Отметка 1 Отметка 2 Отметка 1
Отметка 1 Отметка 2 Отметка 1 Отметка 2 Отметка 1 Отметка 2 Отметка 1
20,000
20,000
20,000
19,980
19,980
19,980
9,940 10,060 9,960 10,040 9,980 10,020
9,940 10,060 9,960 10,040 9,980 10,020
9,940 10,060 9,960 10,040 9,980 10,020
5,000
5,000
5,000
20,000 мм
20,000 мм
20,000 мм
-[9960/(20020-20000)*20000+5000] = -9965000
-[9960/(20020-20000)*20000+5000] = -9965000
-[9960/(20020-20000)*20000+5000] = -9965000
20,020мм
20,020мм
20,020мм
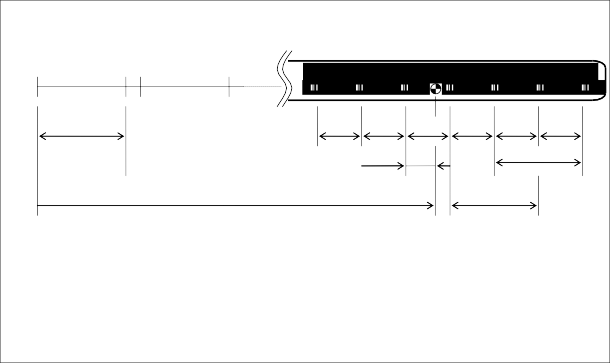
Параметры
№ 1821 (интервал отметки 1) = 20000
№ 1882 (интервал отметки 2) = 20020
№ 1883 (исходная позиция) = позиция точки A + 5,000
= расстояние между A и B/(отметка 2 отметка 1) отметка 1 + 5000
= 9960/(20020-20000) 20000 + 5000
= 9965000
= -9965000 (исходная позиция на отрицательной стороне)
Параметры
№ 1821 (интервал отметки 1) = 20000
№ 1882 (интервал отметки 2) = 20020
№ 1883 (исходная позиция) = позиция точки A + 5,000
= расстояние между A и B/(отметка 2 отметка 1) отметка 1 + 5000
= 9960/(20020-20000) 20000 + 5000
= 9965000
= -9965000 (исходная позиция на отрицательной стороне)
Параметры
№ 1821 (интервал отметки 1) = 20000
№ 1882 (интервал отметки 2) = 20020
№ 1883 (исходная позиция) = позиция точки A + 5,000
= расстояние между A и B/(отметка 2 отметка 1) отметка 1 + 5000
= 9960/(20020-20000) 20000 + 5000
= 9965000
= -9965000 (исходная позиция на отрицательной стороне)
Если используется кодер, изображенный на Fig. 4.18 (b), на станке с системой приращения IS-B и миллиметрами:
Рис. 4.18 (b)
![]()
B-64700RU/01 4. ОПИСАНИЕ ПАРАМЕТРОВ
[Настройка параметра № 1883]
Если измерить расстояние от нулевой точки шкалы до исходной позиции сложно (параметр № 1883), то для его определения можно использовать следующий метод.
<1> Задайте параметр № 1815, чтобы активировать эту функцию.
Задайте подходящее значение параметрам № 1821 и 1882. Задайте 0 параметру № 1240.
Задайте 0 параметрам № 1883 и 1884.
<2> Задайте исходную позицию в подходящем положении.
(в результате координаты станка будут соответствовать расстоянию от нулевой точки шкалы до текущей позиции.)
<3> В режиме толчковой подачи или подачи штурвалом установите станок точно на исходную позицию.
<4> В параметре № 1883 задайте указанные выше координаты станка, преобразованные в единицу обнаружения (координаты станка CMR).
<5> При необходимости настройте параметр № 1240.
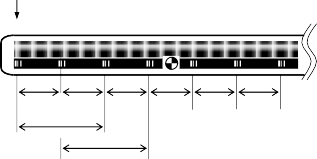
Если используется линейная шкала с абсолютным адресом нулевой точки, задайте расстояние от базисной точки до исходной позиции в параметрах № 1883 и 1884. Базисная точка
— это точка на конце шкалы, как показано на Fig. 4.18 (c).
![]()
Отметка 1Отметка 2 Отметка 1Отметка 2Отметка 1Отметка 2Отметка 1
Отметка 1Отметка 2 Отметка 1Отметка 2Отметка 1Отметка 2Отметка 1
Отметка 1Отметка 2 Отметка 1Отметка 2Отметка 1Отметка 2Отметка 1
10,020 9,980 10,040 9,960 10,060 9,940
20,000
20,020
10,020 9,980 10,040 9,960 10,060 9,940
20,000
20,020
10,020 9,980 10,040 9,960 10,060 9,940
20,000
20,020
Базовая точка Исходная позиция
Рис. 4.18 (c)
Если исходная позиция расположена в положительном направлении при взгляде со стороны базисной точки, задайте положительное значение; если исходная позиция расположена в отрицательном направлении, задайте отрицательное значение. Задайте значение, как описано ниже.
<1> Для активации данной функции настройте бит 1 (OPTx) параметра № 1815, бит 2 (DCL) параметра № 1815 и биту3 (SDCx) параметра № 1818.
Задайте 0 параметру № 1240.
Задайте 0 параметрам № 1883 и 1884.
<2> Задайте исходную позицию в подходящем положении.
(в результате значение координат станка будет указывать на расстояние от базисной точки до текущего положения).
<3> В режиме толчковой подачи или подачи штурвалом установите станок точно на исходную позицию.
<4> В параметрах № 1883 и 1884 задайте указанные выше координаты станка, преобразованные в единицу обнаружения (координаты станка CMR).
При необходимости настройте параметр № 1240.
![]()
4. ОПИСАНИЕ ПАРАМЕТРОВ B-64700RU/01
ПРИМЕЧАНИЕ
1 Настройте параметры № 1883 и 1884 так, чтобы расстояние от нулевой точки шкалы (для линейной шкалы с абсолютными адресами исходных отметок) или базисной точки (для линейной шкалы с абсолютным адресом нулевой точки) до исходной позиции находилось в диапазоне от -999 999 999 999 до
+999 999 999 999. Если задано значение, выходящее за этот диапазон, выдается аварийный сигнал DS0016 или DS1448.
2 Область шкалы не должна выходить за нулевую точку или базисную точку. Выполняйте настройки параметров так, чтобы область шкалы не выходила за нулевую точку или базисную точку.
1885
Максимально допустимое значение общего перемещения при контроле крутящего момента
[Тип ввода] Ввод параметров [Тип данных] Слово оси
[Единица данных] Единица обнаружения [Действительный диапазон данных] от 0 до 32767
Задает максимально допустимое совокупное значение перемещения (значение счетчика погрешности) во время контроля крутящего момента. Если совокупное значение перемещения превышает установленное значение, то выдается аварийный сигнал сервосистемы SV0423.
ПРИМЕЧАНИЕ
Этот параметр активен, если бит 4 (TQF) параметра № 1803) равен 0 (слежение не производится при контроле крутящего момента).
1886
Позиционное отклонение при отмене контроля крутящего момента
[Тип ввода] Ввод параметров [Тип данных] Слово оси
[Единица данных] Единица обнаружения [Действительный диапазон данных] от 1 до 32767
Задает значение позиционного отклонения, если отменен контроль крутящего момента для возврата к контролю по положению. После снижения позиционного отклонения до значения, установленного в параметре, выполняется переключение на контроль по положению.
ПРИМЕЧАНИЕ
Этот параметр активен, если бит 4 (TQF) параметра № 1803) равен 0 (слежение не производится при контроле крутящего момента).
![]()
B-64700RU/01 4. ОПИСАНИЕ ПАРАМЕТРОВ
1895
Номер оси серводвигателя, используемой для фрезы
[Тип ввода] Ввод параметров [Тип данных] Байт траектории
[Действительный диапазон данных] От 1 до числа управляемых осей
Этот параметр устанавливает номер оси серводвигателя, используемой для отображения скорости фрезы, которая соединена с сервоприводом.
1898
Число зубьев на шестерне на стороне оси сервопривода
[Тип ввода] Ввод параметров [Тип данных] Слово оси
[Действительный диапазон данных] от 1 до 9999
Этот параметр устанавливает число зубьев на шестерне оси сервопривода, используемой для отображения скорости фрезы, которая соединена с сервоприводом.
ПРИМЕЧАНИЕ
Этот параметр действителен при ненулевом значении параметра № 1895.
1899
Число зубьев на шестерне на стороне оси фрезерования
[Тип ввода] Ввод параметров [Тип данных] Слово оси
[Действительный диапазон данных] от 1 до 9999
Этот параметр устанавливает число зубьев на шестерне оси фрезерования, используемой для отображения скорости фрезы, которая соединена с сервоприводом.
ПРИМЕЧАНИЕ
Этот параметр действителен при ненулевом значении параметра № 1895.
№7 №6 №5 №4 №3 №2 №1 №0
ASE | FMD |
1902
ASE | FMD |
[Тип ввода] Ввод параметров [Тип данных] Бит
ПРИМЕЧАНИЕ
При настройке любого из данных параметров отключите питание, прежде чем продолжить работу.
![]()
4. ОПИСАНИЕ ПАРАМЕТРОВ B-64700RU/01
#0 FMD Настройка FSSB производится в: 0: Автоматическом режиме
(когда связь между осью и усилителем определяется на экране настроек FSSB; параметр № 1023, бит 0 параметра
№ 2013, бит 0 параметра № 2014, параметр № 3717, бит 4
параметра № 11802 и параметры с 24000 по 24103 настраиваются автоматически).
1: Ручном режиме 2.
(параметр № 1023, бит 0 параметра № 2013, бит 0 параметра
№ 2014, параметр № 3717, бит 4 параметра № 11802 и параметры с 24000 по 24103 настраиваются вручную).
№1 ASE В автоматическом режиме настройки FSSB (бит 0 (FMD) параметра № 1902 выставлен на 0) автоматическая настройка:
0: Не завершается.
1: Завершается..
Этот бит автоматически получает значение 1 по завершении автоматической настройки.
№7 №6 №5 №4 №3 №2 №1 №0
DCE |
1902
DCE |
DCN |
1904
DCN |
Данные параметры связаны с системой двойной проверки безопасности.
Подробная информация приведена в «Руководстве по подключению системы двойной проверки безопасности» (B-64483EN-2).
1945
![]()
1946
![]()
1948
![]()
1950
![]()
Данные параметры связаны с системой двойной проверки безопасности.
Подробная информация приведена в «Руководстве по подключению системы двойной проверки безопасности» (B-64483EN-2).
Параметры с 2000 по 2999 предназначены для цифровой сервосистемы. В настоящем руководстве не описаны приведенные ниже параметры. См. Руководство по параметрам сервопривода перем. тока FANUC серии i (B-65270EN)
![]()
B-64700RU/01 4. ОПИСАНИЕ ПАРАМЕТРОВ
№ | Тип данных | Содержание | |||||||
2000 | Бит оси | PGEX | DGP | PLC0 | |||||
2001 | Бит оси | AMR6 | AMR5 | AMR4 | AMR3 | AMR2 | AMR1 | AMR0 | |
2002 | Бит оси | PFSE | |||||||
2003 | Бит оси | OVSC | BLEN | NPSP | PIEN | OBEN | TGAL | ||
2004 | Бит оси | TRW1 | TRW0 | TIB0 | TIA0 | ||||
2005 | Бит оси | SFCM | BRKC | FEED | |||||
2006 | Бит оси | FCBL | |||||||
2007 | Бит оси | TRQ | IGNV | ESP2 | |||||
2008 | Бит оси | LAXD | VFA | TDM | |||||
2009 | Бит оси | BLST | BLCU | DMY | |||||
2010 | Бит оси | POLE | HBBL | HBPE | BLTE | LINE | |||
2011 | Бит оси | XIA | RCCL | FFAL | SYN | ||||
2012 | Бит оси | STNG | VCM2 | VCMD1 | MSFE | ||||
2013 | Бит оси | APTG | HRV3 | ||||||
2014 | Бит оси | SPCTRF | SPF | ||||||
2015 | Бит оси | BZNG | BLAT | TDOU | SSG1 | PGTW | |||
2016 | Бит оси | SPS | PK2VDN | ABNT | |||||
2017 | Бит оси | PK2V25 | HTN | COMSRC | DBST | ||||
2018 | Бит оси | PFBCPY | OVR8 | MOVOBS | RVRSE | ||||
2019 | Бит оси | DPFB | SLEN | INVSYS | LBUFEX | TANDMP | |||
2020 | Слово оси | Номер двигателя | |||||||
2021 | Слово оси | Коэффициент инерции нагрузки | |||||||
2022 | Слово оси | Направление вращения двигателя | |||||||
2023 | Слово оси | Число импульсов скорости | |||||||
2024 | Слово оси | Число импульсов положения | |||||||
2028 | Слово оси | Скорость изменения усиления в цепи позиционирования | |||||||
2029 | Слово оси | Эффективная скорость для интегрального ускорения на низкой скорости | |||||||
2030 | Слово оси | Эффективная скорость для интегрального замедления на низкой скорости | |||||||
2031 | Слово оси | Пороговая разность крутящего момента для срабатывания аварийного сигнала крутящего момента | |||||||
2034 | Слово оси | Затухание коэффициента усиления в контуре управления | |||||||
2036 | Слово оси | Затухание коэффициента усиления компенсации (главная ось) и затухание коэффициента фазы компенсации (вспомогательная ось) при каскадном управлении | |||||||
2039 | Слово оси | Ускорение второй фазы при двухфазном ускорении мертвого хода | |||||||
2040 | Слово оси | Коэффициент усиления интегральной составляющей в цепи тока (PK1) | |||||||
2041 | Слово оси | Коэффициент усиления пропорциональной составляющей в цепи тока (PK2) | |||||||
2042 | Слово оси | Коэффициент усиления в цепи тока (PK3) | |||||||
2043 | Слово оси | Коэффициент усиления интегральной составляющей в цепи скорости (PK1V) | |||||||
2044 | Слово оси | Коэффициент усиления пропорциональной составляющей в цепи скорости (PK2V) | |||||||
2045 | Слово оси | Неполный коэффициент интегральной составляющей в цепи скорости (PK3V) | |||||||
2046 | Слово оси | Коэффициент усиления в цепи скорости (PK4V) | |||||||
2047 | Слово оси | Параметр наблюдателя (POA1) | |||||||
2048 | Слово оси | Ускорение мертвого хода | |||||||
2049 | Слово оси | Максимальная амплитуда обратной связи по двойственному положению | |||||||
2050 | Слово оси | Параметр наблюдателя (POK1) | |||||||
2051 | Слово оси | Параметр наблюдателя (POK2) | |||||||
2053 | Слово оси | Текущая коррекция мертвой зоны (PPMAX) | |||||||
2054 | Слово оси | Текущая коррекция мертвой зоны (PDDP) | |||||||
2055 | Слово оси | Текущая коррекция мертвой зоны (PHYST) | |||||||
2056 | Слово оси | Переменный коэффициент усиления тока во время замедления | |||||||
2057 | Слово оси | Ток фазы D на высокой скорости | |||||||
2058 | Слово оси | Предел тока фазы D на высокой скорости | |||||||
2060 | Слово оси | Предел крутящего момента | |||||||
2062 | Слово оси | Коэффициент защиты от перегрузки (OVC1) | |||||||
![]()
4. ОПИСАНИЕ ПАРАМЕТРОВ B-64700RU/01
№ | Тип данных | Содержание |
2063 | Слово оси | Коэффициент защиты от перегрузки (OVC2) |
2064 | Слово оси | Аварийный уровень постепенного останова |
2065 | Слово оси | Коэффициент защиты от перегрузки (OVCLMT) |
2066 | Слово оси | Коэффициент усиления в цепи обратной связи при ускорении |
2067 | Слово оси | Фильтр команд крутящего момента |
2068 | Слово оси | Коэффициент упреждения |
2069 | Слово оси | Коэффициент упреждения скорости |
2070 | Слово оси | Тайминг ускорения мертвого хода |
2071 | Слово оси | Эффективное продолжительность ускорения мертвого хода, количество выполненных коррекций начальной силы трения |
2072 | Слово оси | Коррекция начальной силы трения |
2073 | Слово оси | Параметр для определения прекращения коррекции начальной силы трения |
2074 | Слово оси | Токозависимый коэффициент усиления в цепи тока |
2077 | Слово оси | Счетчик коррекций перерегулирования |
2078 | Слово оси | Коэффициент преобразования для обратной связи по двойственному положению (числитель) |
2079 | Слово оси | Коэффициент преобразования для обратной связи по двойственному положению (знаменатель) |
2080 | Слово оси | Постоянная времени линейного запаздывания для обратной связи по двойственному положению |
2081 | Слово оси | Нулевая ширина для обратной связи по двойственному положению |
2082 | Слово оси | Величина останова при ускорении мертвого хода |
2083 | Слово оси | Таймер контроля тормоза (мс) |
2084 | Слово оси | Передача гибкой подачи (числитель) |
2085 | Слово оси | Передача гибкой подачи (знаменатель) |
2086 | Слово оси | Параметр номинального тока |
2087 | Слово оси | Коррекция крутящего момента |
2088 | Слово оси | Коэффициент усиления обратной связи скорости станка |
2089 | Слово оси | Увеличение при завершении второй фазы для двухфазного ускорения мертвого хода |
2090 | Слово оси | Характеристика крутящего момента шпинделя: коэффициент A |
2092 | Слово оси | Коэффициент опережающего просмотра упреждения |
2093 | Слово оси | Характеристика крутящего момента шпинделя: коэффициент B |
2094 | Слово оси | Величина ускорения мертвого хода в отрицательном направлении |
2095 | Слово оси | Коэффициент подстройки тайминга упреждения |
2096 | Слово оси | Контроль точки обработки: параметр подстройки тайминга |
2097 | Слово оси | Параметр прекращения коррекции начальной силы трения |
2099 | Слово оси | Уровень подавления N-импульсов |
2101 | Слово оси | Эффективный уровень коррекции перерегулирования |
2102 | Слово оси | Значение окончательного ограничения фактического предела тока |
2103 | Слово оси | Величина отхода при обнаружении непредвиденного возмущающего момента |
2104 | Слово оси | Аварийный уровень обнаружения непредвиденного возмущающего момента (при обработке с переключением) |
2105 | Слово оси | Постоянная крутящего момента при контроле крутящего момента |
2107 | Слово оси | Коррекция коэффициента усиления в цепи скорости во время резания |
2110 | Слово оси | Коррекция магнитного насыщения (база/коэффициент) |
2111 | Слово оси | Предел крутящего момента замедления (база/коэффициент) |
2112 | Слово оси | Коэффициент преобразования AMR 1 |
2113 | Слово оси | Резонансный фильтр 1: средняя частота затухания |
2114 | Слово оси | Коррекция величины ускорения при ускорении мертвого хода |
2116 | Слово оси | Обнаружение непредвиденного возмущающего момента, величина коррекции динамического трения |
2118 | Слово оси | Уровень погрешности, превышающей допустимую, между полузамкнутым и замкнутым контурами при обратной связи по двойственному положению |
2119 | Слово оси | Уровень остановки по переменному коэффициент усиления пропорциональной части |
![]()
B-64700RU/01 4. ОПИСАНИЕ ПАРАМЕТРОВ
№ | Тип данных | Содержание | |||||||
2126 | Слово оси | Каскадное управление; постоянная времени для обратной связи переключения положения | |||||||
2127 | Слово оси | Коэффициент автономного регулирования | |||||||
2128 | Слово оси | Коррекция слабого магнитного потока (коэффициент) | |||||||
2129 | Слово оси | Коррекция слабого магнитного потока (база/предел) | |||||||
2130 | Слово оси | Две сглаженные коррекции на одну пару магнитных полюсов | |||||||
2131 | Слово оси | Четыре сглаженные коррекции на одну пару магнитных полюсов | |||||||
2132 | Слово оси | Шесть сглаженных коррекций на одну пару магнитных полюсов | |||||||
2133 | Слово оси | Коэффициент коррекции фазовой задержки при замедлении (PHDLY1) | |||||||
2134 | Слово оси | Коэффициент коррекции фазовой задержки при замедлении (PHDLY2) | |||||||
2137 | Слово оси | Коррекция величины ускорения на фазе 1 при двухфазовом ускорении мертвого хода | |||||||
2138 | Слово оси | Коэффициент преобразования AMR 2 | |||||||
2139 | Слово оси | Коррекция AMR | |||||||
2142 | Слово оси | Аварийный уровень обнаружения непредвиденного возмущающего момента при ускоренном перемещении | |||||||
2144 | Слово оси | Коэффициент упреждения в цепи позиционирования при резке | |||||||
2145 | Слово оси | Коэффициент упреждения в цепи скорости при резке | |||||||
2146 | Слово оси | Таймер завершения двухфазного ускорения мертвого хода | |||||||
2156 | Слово оси | Фильтр команд крутящего момента (при ускоренном перемещении) | |||||||
2161 | Слово оси | Увеличение OVC при останове (OVCSTP) | |||||||
2162 | Слово оси | Второй коэффициент защиты от перегрузки (POVC21) | |||||||
2163 | Слово оси | Второй коэффициент защиты от перегрузки (POVC22) | |||||||
2164 | Слово оси | Второй коэффициент защиты от перегрузки (POVCLMT2) | |||||||
2165 | Слово оси | Максимальный ток усилителя | |||||||
2167 | Слово оси | Смещение величины ускорения на фазе 2 при двухфазовом ускорении мертвого хода | |||||||
2173 | Слово оси | Расстояние подъема при выполнении функции подъема во время аварийного останова для преодоления силы тяжести | |||||||
2177 | Слово оси | Резонансный фильтр 1: Ширина полосы затухания | |||||||
2179 | Слово оси | Емкость исходного счетчика (знаменатель) | |||||||
2182 | Слово оси | Ток A для обнаружения полюса | |||||||
2185 | Слово оси | Коэффициент преобразования импульса положения | |||||||
2198 | Слово оси | Ток B для обнаружения полюса | |||||||
2199 | Слово оси | Ток C для обнаружения полюса | |||||||
2200 | Бит оси | P2EX | ABGO | IQOB | OVSP | ||||
2201 | Бит оси | CPEE | RNLV | CROF | |||||
2202 | Бит оси | DUAL0W | OVS1 | PIAL | VGCCR | ||||
2203 | Бит оси | FRC2AX2 | CRPI | ||||||
2204 | Бит оси | DBS2 | PGTWN2 | HSTP10 | |||||
2205 | Бит оси | HDIS | HD2O | FULDMY | |||||
2206 | Бит оси | HBSF | |||||||
2207 | Бит оси | PK2D50 | |||||||
2209 | Бит оси | HCNGL | |||||||
2210 | Бит оси | ESPTM1 | ESPTM0 | PK12S2 | |||||
2211 | Бит оси | PLW4 | PLW2 | PHCP | |||||
2212 | Бит оси | OVQK | |||||||
2213 | Бит оси | OCM | |||||||
2214 | Бит оси | FFCHG | |||||||
2215 | Бит оси | ABT2 | TCPCLR | ||||||
2220 | Бит оси | P16 | DECAMR | ||||||
2221 | Бит оси | VFFNCH | LNOTCH | ||||||
2223 | Бит оси | BLCUT2 | DISOBS | ||||||
2226 | Бит оси | MEMCLR | PRFCLR | QUCKST | |||||
2227 | Бит оси | ANGLNG | ANGREF | GOKAN | ERRCHK | PARTLN | |||
2229 | Бит оси | TAWAMI | STPRED | ABSEN | |||||
![]()
4. ОПИСАНИЕ ПАРАМЕТРОВ B-64700RU/01
№ | Тип данных | Содержание | |||||||
2265 | Слово оси | Контроль точки обработки: усиление 2 | |||||||
2266 | Слово оси | Контроль точки обработки: усиление 1 | |||||||
2268 | Слово оси | Допустимое увеличение расстояния перемещения / значение определения скорости останова | |||||||
2270 | Бит оси | DSTIN | DSTTAN | DSTWAV | ACREF | AMR60 | |||
2271 | Бит оси | 2NDTMG | RETR2 | ||||||
2273 | Бит оси | DBTLIM | EGBFFG | EGE | POA1NG | WSVCPY | |||
2274 | Бит оси | DD2048 | HP2048 | ||||||
2275 | Бит оси | RCNCLR | 800PLS | ||||||
2277 | Бит оси | ACC1ON | ACC2ON | ACC3ON | ACCNEG | ||||
2278 | Бит оси | PM2ACC | PM2SCB | PM1SCB | PM2TP | PM1TP | |||
2279 | Бит оси | DMCON | |||||||
2281 | Бит оси | RDPRR | PU2 | PU1 | |||||
2282 | Бит оси | FSAQS | ISE64 | ||||||
2283 | Бит оси | BLSTP2 | NOG54 | ||||||
2288 | Бит оси | MCPEF | |||||||
2290 | Бит оси | ACCMON | ACCHLD | ACCOUT | |||||
2292 | Бит оси | MOVAXS | MV1IFC | IFC1ON | C1TYP1 | C1TYP0 | |||
2293 | Бит оси | MV2IFC | IFC2ON | C2TYP1 | C2TYP0 | ||||
2300 | Бит оси | CKLNOH | THRMO | Dd | HRVEN | ||||
2301 | Бит оси | TQCT10 | |||||||
2304 | Слово оси | Предел крутящего момента при ускорении 1 | |||||||
2305 | Слово оси | Предел крутящего момента при ускорении 2 | |||||||
2310 | Слово оси | Ток фазы D при высокой скорости: коэффициент напряжения | |||||||
2315 | Слово оси | Настройка выходного сигнала на интерфейсе проверки сервопривода | |||||||
2318 | Слово оси | Усиление помехоподавляющего фильтра | |||||||
2319 | Слово оси | Коэффициент инерции помехоподавляющего фильтра | |||||||
2320 | Слово оси | Усиление обратной функции помехоподавляющего фильтра | |||||||
2321 | Слово оси | Постоянная времени помехоподавляющего фильтра | |||||||
2322 | Слово оси | Предел обратной связи по ускорению помехоподавляющего фильтра | |||||||
2323 | Слово оси | Переменный коэффициент звена ПИ в цепи тока | |||||||
2324 | Слово оси | Опциональное увеличение при останове резания для функции переменного коэффициента усиления пропорциональной составляющей для времени останова | |||||||
2325 | Слово оси | Коэффициента усиления интегральной составляющей (главная ось) и коэффициента фазы (вспомогательная ось) при каскадном управлении | |||||||
2326 | Слово оси | Коэффициент усиления помех на входе | |||||||
2327 | Слово оси | Начальная частота помех на входе | |||||||
2328 | Слово оси | Конечная частота помех на входе | |||||||
2329 | Слово оси | Число точек измерения помех на входе | |||||||
2333 | Слово оси | Неполный коэффициент интегральной составляющей (главная ось) при каскадном управлении зажимом | |||||||
2334 | Слово оси | Увеличение усиления в цепи тока (действительно только при высокоскоростном управлении током HRV) | |||||||
2335 | Слово оси | Увеличение усиления в цепи скорости (действительно только при высокоскоростном управлении током HRV) | |||||||
2338 | Слово оси | Предел величины ускорения при ускорении мертвого хода Предел ускорения второй фазы при двухфазном ускорении мертвого хода | |||||||
2339 | Слово оси | Величина ускорения второй фазы (отрицательное направление) при двухфазном ускорении мертвого хода | |||||||
2340 | Слово оси | Коррекция величины ускорения (отрицательное направление) при ускорении мертвого хода Коррекция ускорения второй фазы (отрицательное направление) при двухфазном ускорении мертвого хода | |||||||
![]()
B-64700RU/01 4. ОПИСАНИЕ ПАРАМЕТРОВ
№ | Тип данных | Содержание |
2341 | Слово оси | Предел величины ускорения (отрицательное направление) при ускорении мертвого хода Предел ускорения второй фазы (отрицательное направление) при двухфазном ускорении мертвого хода |
2345 | Слово оси | Величина коррекции динамического трения при останове для функции оценки помех |
2346 | Слово оси | Предел величины коррекции динамического трения для функции оценки помех |
2347 | Слово оси | Величина коррекции начальной силы трения (отрицательное направление) |
2352 | Слово оси | Уровень обнаружения фильтра адаптивного подавления |
2355 | Слово оси | Контроль точки обработки: Средняя частота полосно-пропускающего фильтра |
2356 | Слово оси | Резонансный фильтр L: степень заграждения упреждающего фильтра |
2357 | Слово оси | Аварийный предел разности скоростей при каскадном управлении |
2358 | Слово оси | Обнаружение непредвиденного возмущающего момента: таймер послеускорения |
2359 | Слово оси | Резонансный фильтр 1: Уменьшение амплитуды |
2360 | Слово оси | Резонансный фильтр 2: Средняя частота затухания |
2361 | Слово оси | Резонансный фильтр 2: Ширина полосы затухания |
2362 | Слово оси | Резонансный фильтр 2: Уменьшение амплитуды |
2363 | Слово оси | Резонансный фильтр 3: Средняя частота затухания |
2364 | Слово оси | Резонансный фильтр 3: Ширина полосы затухания |
2365 | Слово оси | Резонансный фильтр 3: Уменьшение амплитуды |
2366 | Слово оси | Резонансный фильтр 4: Средняя частота затухания |
2367 | Слово оси | Резонансный фильтр 4: Ширина полосы затухания |
2368 | Слово оси | Резонансный фильтр 4: Уменьшение амплитуды |
2369 | Слово оси | Две сглаженные коррекции на пару магнитных полюсов (отрицательное направление) |
2370 | Слово оси | Четыре сглаженные коррекции на пару магнитных полюсов (отрицательное направление) |
2371 | Слово оси | Шесть сглаженных коррекций на пару магнитных полюсов (отрицательное направление) |
2373 | Слово оси | Величина подъема при выполнении функции подъема вертикальной оси во время аварийного останова |
2374 | Слово оси | Время подъема при выполнении функции подъема вертикальной оси во время аварийного останова |
2375 | Слово оси | Увеличение предела крутящего момента во время управления торможением |
2377 | Слово оси | Сглаженная коррекция, выполненная 1,5 раза на одну пару полюсов |
2378 | Слово оси | Сглаженная коррекция, выполненная 1,5 раза на одну пару полюсов (отрицательное направление) |
2380 | Слово оси | Сглаженная коррекция, выполненная три раза на одну пару полюсов |
2381 | Слово оси | Сглаженная коррекция, выполненная 1,5 раза на одну пару полюсов (отрицательное направление) |
2382 | Слово оси | Управление кручением с опережающим просмотром: максимальная величина коррекции |
2383 | Слово оси | Управление кручением с опережающим просмотром: ускорение 1 |
2384 | Слово оси | Управление кручением с опережающим просмотром: ускорение 2 |
2385 | Слово оси | Управление кручением с опережающим просмотром: ускорение 3 |
2386 | Слово оси | Управление кручением с опережающим просмотром: величина коррекции ускорения кручения K1 |
2387 | Слово оси | Управление кручением с опережающим просмотром: величина коррекции ускорения кручения K2 |
2388 | Слово оси | Управление кручением с опережающим просмотром: величина коррекции ускорения кручения K3 |
2389 | Слово оси | Управление кручением с опережающим просмотром: величина коррекции выдержки кручения KD |
2390 | Слово оси | Управление кручением с опережающим просмотром: величина коррекции выдержки кручения KDN |
2391 | Слово оси | Управление кручением с опережающим просмотром: величина коррекции ускорения кручения K1N |
2392 | Слово оси | Управление кручением с опережающим просмотром: величина коррекции ускорения кручения K2N |
![]()
4. ОПИСАНИЕ ПАРАМЕТРОВ B-64700RU/01
№ | Тип данных | Содержание | |||||||
2393 | Слово оси | Управление кручением с опережающим просмотром: величина коррекции ускорения кручения K3N | |||||||
2394 | Слово оси | Число цифр маски данных | |||||||
2402 | Слово оси | Управление кручением с опережающим просмотром: коэффициент коррекции момента кручения | |||||||
2403 | Слово оси | Автоматическая коррекция синхронных осей: коэффициент | |||||||
2404 | Слово оси | Автоматическая коррекция синхронных осей: величина максимальной коррекции (вспомогательная ось), ширина мертвой зоны (основная ось) | |||||||
2405 | Слово оси | Автоматическая коррекция синхронных осей: коэффициент фильтра | |||||||
2437 | Бит оси | DCH | |||||||
2455 | Слово оси | Целая часть () количества импульсов одного оборота | |||||||
2456 | Слово оси | Экспоненциальная часть () количества импульсов одного оборота | |||||||
2463 | Слово оси | Монитор контроля потребляемой мощности: коэффициент общей потери мощности C | |||||||
2468 | Слово оси | Монитор контроля потребляемой мощности: сопротивление на обмотках двигателя | |||||||
2469 | Слово оси | Монитор контроля потребляемой мощности: коэффициент потери мощности на сервоусилителе A | |||||||
2478 | Слово оси | Интерактивная коррекция усилия: коэффициент усиления коррекции (первой подвижной оси) | |||||||
2479 | Слово оси | Интерактивная коррекция усилия: смещение угловых данных координат (первой подвижной оси) | |||||||
2480 | Слово оси | Интерактивная коррекция усилия: коэффициент усиления коррекции (второй подвижной оси) | |||||||
2481 | Слово оси | Интерактивная коррекция усилия: смещение угловых данных координат (второй подвижной оси) | |||||||
2482 | Слово оси | Уровень обнаружения заданной скорости | |||||||
2483 | Слово оси | Уровень обнаружения нулевой скорости | |||||||
2490 | Слово оси | Монитор контроля потребляемой мощности: коэффициент потери мощности на сервоусилителе B | |||||||
2491 | Слово оси | Монитор контроля потребляемой мощности: коэффициент общей потери мощности D | |||||||
2570 | Бит оси | DCFULL | |||||||
2606 | Слово оси | Интерактивная коррекция усилия: конфигурация подвижной оси | |||||||
№7 №6 №5 №4 №3 №2 №1 №0
VFAx | TDMx |
2008
VFAx | TDMx |
[Тип ввода] Ввод параметров [Тип данных] Бит оси
№1 TDMx Данный бит автоматически устанавливается на 1, если бит 6 (ось каскадного управления) параметра № 1817 установлен на 1.
Данный бит нельзя установить напрямую.
№2 VFAx В каскадном управлении функция усреднения обратной связи скорости подачи:
0: Откл.
1: Вкл.
![]()
B-64700RU/01 4. ОПИСАНИЕ ПАРАМЕТРОВ
№7 №6 №5 №4 №3 №2 №1 №0
XIAx | SYNx |
2011
XIAx | SYNx |
[Тип ввода] Ввод параметров [Тип данных] Бит оси
№0 SYNx Если используется функция привода синхронного вала (EGB), то данный бит задает ось для синхронизации.
0: Ось не синхронизируется с помощью EGB 1: Ось синхронизируется с помощью EGB Задайте 1 для ведомой и мнимой оси EGB.
ПРИМЕЧАНИЕ
Для вступления этого параметра в силу отключите и повторно включите питание.
№7 XIAx Установка временных абсолютных координат: 0: Не используется.
1: Используется.
ПРИМЕЧАНИЕ
1 Если используется установка временных абсолютных координат, необходимо задать бит 1 (OPTx) параметра
№ 1815, бит 5 (APCx) параметра № 1815, параметр № 1874 и
параметр № 1875.
2 Для вступления этого параметра в силу отключите и повторно включите питание.
2021
Коэффициент инерции нагрузки
[Тип ввода] Ввод параметров [Тип данных] Слово оси
[Действительный диапазон данных] от 0 до 32767
(Инерция нагрузки)/(инерция двигателя) 256
Для каскадного управления:
(Инерция нагрузки)/(инерция двигателя) 256/2
Задайте одинаковое значение для ведущей и ведомой оси.
2022
Направление вращения двигателя
ПРИМЕЧАНИЕ
При настройке данного параметра отключите питание, прежде чем продолжить работу.
[Тип ввода] Ввод параметров [Тип данных] Слово оси
[Действительный диапазон данных] -111, 111
Задает направление вращения двигателя.
Если двигатель вращается по часовой стрелке при взгляде со стороны импульсного шифратора, установите 111. Если двигатель вращается против часовой стрелки при взгляде со стороны импульсного шифратора, установите -111.
![]()
Вращается против часовой стрелки, если смотреть на импульсный шифратор:
Установите -111.
Вращается против часовой стрелки, если смотреть на импульсный шифратор:
Установите -111.
Вращается против часовой стрелки, если смотреть на импульсный шифратор:
Установите -111.
FANUC
FANUC
FANUC
Вращается по часовой стрелке, если смотреть на импульсный шифратор:
Установите 111.
Вращается по часовой стрелке, если смотреть на импульсный шифратор:
Установите 111.
Вращается по часовой стрелке, если смотреть на импульсный шифратор:
Установите 111.
4. ОПИСАНИЕ ПАРАМЕТРОВ B-64700RU/01
2031
Пороговая разность крутящего момента для аварийного сигнала крутящего момента
[Тип ввода] Ввод параметров [Тип данных] Слово оси
[Действительный диапазон данных] от 0 до 14564
Если абсолютное значение разности команд крутящего момента между двумя осями превышает значение, заданное в этом параметре, срабатывает аварийный сигнал.
Задайте одинаковое значение для двух синхронно управляемых осей.
Номера осей сервоприводов синхронизированной ведущей оси и ведомой оси должны присваиваться таким образом, чтобы ведущая ось имела нечетный номер, а следующий номер присваивался ведомой оси. Примеры: (1, 2) и (3, 4).
2087
Значение предварительной нагрузки для каждой оси (коррекция Tcmd)
[Тип ввода] Ввод параметров [Тип данных] Слово оси
[Единица данных] (Предел тока, А)/7282 [Действительный диапазон данных] от -1821 до 1821
Коррекция применяется для команды управления крутящим моментом для подавления мертвого хода.
Задайте значение, немного превышающее трение. Ориентируйтесь на значение, приблизительно равное одной трети номинального крутящего момента.
[Пример]
Для установки крутящего момента, эквивалентного 3 A, в противоположных направлениях:
Если предел тока равен 40 A
3/(40/7282) | = | 546 |
Сторона задатчика | = | 546 |
Сторона исполнителя | = | 546 |
![]()
B-64700RU/01 4. ОПИСАНИЕ ПАРАМЕТРОВ
№7 №6 №5 №4 №3 №2 №1 №0
ISE64 |
2282
ISE64 |
[Тип ввода] Ввод параметров [Тип данных] Бит оси
№3 ISE64 При упреждении (бит 1 (FEED) параметра № 2005 равен 1): 0: Применяются обычные пределы скорости подачи.
1: Применяются расширенные пределы скорости подачи.
Если упреждение включено, бит 7 параметра № 1013 устанавливается на 1 и этот параметр задается для оси, то пределы скорости подачи для оси увеличиваются согласно таблице при использовании системы приращений IS-C:
[Обычный регулирование по положению]
Функции, используемые при обычном регулировании по положению | Допустимая скорость подачи | ||||
Высокая скорость, высокая точность | Упреждение | Единица обнаружения: 1м | Единица обнаружения: 0,1м | ||
- | Не используется/используется (тип с опережающим просмотром) | IS-B: 999 м/мин IS-С: 999 м/мин | IS-B: 196м/мин IS-С: 999 м/мин | ||
Контроль контуров искусственным интеллектом I Контроль контуров искусственным интеллектом II | Не используется/используется (тип с опережающим просмотром) | ||||
Привод синхронного вала | Используется (стандартный тип) | IS-B: 240м/мин |
24 м/мин | ||
IS-С: 100м/мин | |||||
[Если используется регулирование частоты вращения шпинделем сервоприводом]
Функции, используемые при обычном регулировании по положению | Допустимая частота вращения | ||
Расширенная допустимая скорость подачи | Предел скорости подачи, умноженный на 10 | Единица обнаружения: 1/1000 градуса | Единица обнаружения: 1/10000 градуса |
Откл. (№ 1013#7=0) | Откл. (№ 1408#3=0) | IS-B: 2777 мин-1 IS-C: 277 мин-1 | IS-B: 2777 мин-1 IS-C: 277 мин-1 |
Вкл. (№ 1408#3=1) | IS-B: 27 777 мин-1 IS-C: 2777 мин-1 | IS-B: 27 777 мин-1 IS-C: 2777 мин-1 | |
Вкл. (№ 1013#7=1) (№ 2282#3=1) | Откл. (№ 1408#3=0) | IS-B: 2777 мин-1 IS-C: 277 мин-1 | IS-B: 2777 мин-1 IS-C: 277 мин-1 |
Вкл. (№ 1408#3=1) | IS-B: 27 777 мин-1 IS-C: 27 777 мин-1 | IS-B: 27 777 мин-1 IS-C: 2777 мин-1 | |
![]()
4. ОПИСАНИЕ ПАРАМЕТРОВ B-64700RU/01
- Значения, заключенные в прямоугольник в таблице, соответствуют пределам, установленным внутренней обработкой программного обеспечения сервосистемы. При увеличении CMR для уменьшения единицы обнаружения допустимая скорость подачи, ограниченная внутренней обработкой программного обеспечения сервосистемы, снижается пропорционально единице обнаружения (когда единица обнаружения 0,1 м изменяется на 0,05м, допустимая скорость подачи сокращается вдвое).
- В системе полузамкнутого цикла с использованием детектора с высокой разрешающей способностью (роторный или линейный двигатель) использование наноинтерполяции позволяет использовать детектор с максимальной разрешающей способностью, предназначенный для контроля позиционирования, без применения меньшей единицы обнаружения.
- Даже если необходимо использовать крупную единицу обнаружения из-за приведенного выше ограничения скорости подачи единицей обнаружения, данные обратной связи скорости подачи, значительно влияющие на управление цепью скорости, контролируются максимальной разрешающей способностью детектора.
![]()