< Назад | Содержимое | Далее >
4. ОПИСАНИЕ ПАРАМЕТРОВ B-64700RU/01
№7 №6 №5 №4 №3 №2 №1 №0
ISG | |||||||
DGR | MSK | ISG | MHR |
8138
ISG | |||||||
DGR | MSK | ISG | MHR |
ПРИМЕЧАНИЕ
При настройке данного параметра отключите питание, прежде чем продолжить работу.
[Тип ввода] Ввод параметров [Тип данных] Бит
№1 MHR Ручной отвод штурвалом:
0: Не используется.
1: Используется.
№2 ISG Руководство по настройке iHMI: 0: Не используется.
1: Используется.
№3 MSK Ступенчатый пропуск
0: Не используется.
1: Используется.
№4 DGR Функция динамического графического отображения: 0: Не используется.
1: Используется.
4.57 ПАРАМЕТРЫ КОНТРОЛЯ СТОЛКНОВЕНИЙ МЕЖДУ ТРАЕКТОРИЯМИ
![]()
№7 №6 №5 №4 №3 №2 №1 №0
IPF | ZCL | IFE | IFM | IT0 | TY1 | TY0 | |
8140
IPF | ZCL | IFE | IFM | IT0 | TY1 | TY0 | |
[Тип ввода] Ввод параметров [Тип данных] Бит
№0 TY0 Данный параметр задает взаимосвязь системы координат между двумя резцедержателями на основании резцедержателя траектории 1.
№1 TY1 Данный параметр используется для контроля столкновений между двумя траекториями, если бит 7 (IPF) параметра № 8140 равен 0.
![]()
B-64700RU/01 4. ОПИСАНИЕ ПАРАМЕТРОВ
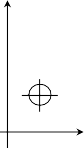
(1) Если TY1=0 и TY0=0
+X Резцедержатель 2 Резцедержатель 1 +Z | (2) Если TY1=0 и TY0=1
+X +X Резцедержатель Резцедержатель 1 2 +Z +Z |
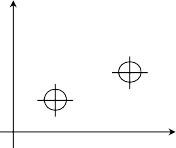
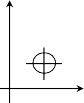
(3) Если TY1=1 и TY0=0
+X
+Z Резцедержатель 2 +Z Резцедержатель 1 +X | (4) Если TY1=1 и TY0=1
+X Резцедержатель 1 +Z +Z Резцедержатель
+X 2 |

№2 IT0 Если с помощью T-кода задан номер коррекции 0:
0: Контроль столкновения между траекториями прекращается до тех пор, пока не будет задан номер коррекции, отличный от 0, с помощью следующего T-кода.
1: Контроль столкновения между траекториями продолжается с использованием указанного ранее номера коррекции.
№3 IFM В ручном режиме контроль столкновений между траекториями: 0: Не выполняется
1: Выполняется.
№4 IFE Контроль столкновений между траекториями: 0: Выполняется.
1: Не выполняется
№5 ZCL Задает необходимость контроля столкновений на оси Z во время контроля столкновений между траекториями.
0: Проверяется.
1: Не проверяется (контролируются только столкновения на оси X).
№7 IPF При контроле столкновений между траекториями:
0: Контролируются столкновения между двумя траекториями. 1: Контролируются столкновения между несколькими
траекториями.
Даже при управлении двумя траекториями можно использовать контроль столкновений между несколькими траекториями.
Если этот параметр равен 0 при управлении тремя или более траекториями, контроль столкновений между двух траекториями выполняется только на траекториях 1 и 2.
![]()
4. ОПИСАНИЕ ПАРАМЕТРОВ B-64700RU/01
8141
Расстояние по оси X между исходными позициями резцедержателя 1 и резцедержателя n в общей группе станков
8143
Расстояние по оси Z между исходными позициями резцедержателя 1 и резцедержателя n в общей группе станков
[Тип ввода] Ввод параметров
[Тип данных] Действительное число траектории [Единица данных] мм, дюйм (единица станка)
[Минимальная единица данных] Зависит от системы приращений используемых осей [Действительный диапазон данных] 9 знаков минимальной единицы данных
(см. таблицу настройки стандартных параметров (A))
(в системе приращений IS-B от -999999,999 до +999999,999) Каждый из данных параметров задает расстояние между исходными позициями резцедержателя на траектории 1 и резцедержателя на каждой траектории в общей группе станков.
Задайте 0 параметру № 8141 и 8143 для резцедержателя 1 в каждой группе станков.
На токарном обрабатывающем центре для настройки используется только система координат Z-X, заданная параметра
№ 8141 и 8143.
Пути в одной станочной группе
Пути в одной станочной группе
Пути в одной станочной группе
Резцедержатель 4
Резцедержатель 4
Резцедержатель 4
Резцедержатель 2
Резцедержатель 2
Резцедержатель 2
Исходная позиция
Исходная позиция
Исходная позиция
+X
+X
+X
Исходная позиция
Исходная позиция
Исходная позиция
3
3
3
1
1
1
1
1
1
Исходная позиция
Исходная позиция
Исходная позиция
2
2
2
Резцедержатель 1
Резцедержатель 1
Резцедержатель 1
Резцедержатель 3
Резцедержатель 3
Резцедержатель 3
Исходная позиция
Исходная позиция
Исходная позиция
+Z
+Z
+Z
3
3
3
Резцедержательь пути 1 в общей
2 станочной группе используется в качестве исходного держателя инструмента.
Резцедержательь пути 1 в общей
2 станочной группе используется в качестве исходного держателя инструмента.
Резцедержательь пути 1 в общей
2 станочной группе используется в качестве исходного держателя инструмента.
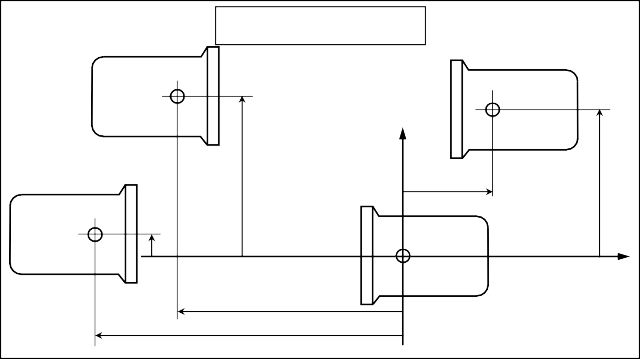
В вышеуказанном примере в общей группе станков содержатся резцедержатели для четырех траекторий. В системе координат плоскости ZX с началом координат, помещенным в исходную позицию резцедержателя 1 траектории 1 в общей группе станков, исходная позиция резцедержателя 2 траектории 2 задается настройкой значения 1 компонента X в параметре № 8141 для траектории 2 и настройкой значения 1 компонента Z в параметре
№ 8143 для траектории 2.
![]()
B-64700RU/01 4. ОПИСАНИЕ ПАРАМЕТРОВ
Аналогично, в системе координат плоскости ZX с началом координат, помещенным в исходную позицию резцедержателя 1, исходная позиция резцедержателя 3 траектории 3 задается настройкой значения 1 компонента X в параметре № 8141 для траектории 3 и настройкой значения 1 компонента Z в параметре
№ 8143 для траектории 3. В системе координат плоскости ZX с началом координат, помещенным в исходную позицию резцедержателя 1, исходная позиция резцедержателя 4 траектории 4 задается настройкой значения 1 компонента X в параметре № 8141 для траектории 4 и настройкой значения 1 компонента Z в параметре № 8143 для траектории 4.
![]()
ПРЕДУПРЕЖДЕНИЕ!
Выполняйте измерение (1, 1), (2, 2) и (3, 3) в состоянии, когда операция возврата в исходную позицию завершена на всех осях (инструмент находится в исходной позиции).
После изменения параметра № 8141 и 8143 для каждой траектории обязательно выполните возврата в исходную позицию на всех осях по всем траекториям. В противном случае отношения позиций резцедержателей, сохраняемые внутри системы, не получат вновь заданные значения параметров.
Единицей ввода является минимальное заданное приращение. Для настройки оси, определяемой диаметром, используйте значение диаметра.
8151
8152
![]()
Расстояние по оси X между исходными позициями резцедержателя 1 и 2
![]()
Расстояние по оси Z между исходными позициями резцедержателя 1 и 2
[Тип ввода] Ввод параметров
[Тип данных] Действительное число [Единица данных] мм, дюйм (единица станка)
[Минимальная единица данных] Зависит от системы приращений используемых осей [Действительный диапазон данных] 9 знаков минимальной единицы данных
(см. таблицу настройки стандартных параметров (A))
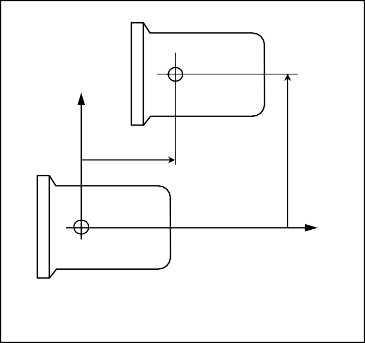
(в системе приращений IS-B от -999999,999 до +999999,999) Данные параметры используется для контроля столкновений между двумя траекториями, если бит 7 (IPF) параметра № 8140 равен 0.
Каждый из данных параметров задает расстояние между резцедержателями двух траекторий.
![]()
Резцедержатель 2
Исходная позиция
Резцедержатель 2
Исходная позиция
Резцедержатель 2
Исходная позиция
+X
+X
+X
+Z
+Z
+Z
Исходная позиция
Резцедержатель 1
Исходная позиция
Резцедержатель 1
Исходная позиция
Резцедержатель 1
В системе координат плоскости Z-X с началом координат в представленном
В системе координат плоскости Z-X с началом координат в представленном
В системе координат плоскости Z-X с началом координат в представленном
положении резцедержателя 1 исходная позиция резцедержателя 2 задается
положении резцедержателя 1 исходная позиция резцедержателя 2 задается
положении резцедержателя 1 исходная позиция резцедержателя 2 задается
параметром № 8151 (составляющая по оси X) и параметром № 8152 (составляющей по оси Z).
параметром № 8151 (составляющая по оси X) и параметром № 8152 (составляющей по оси Z).
параметром № 8151 (составляющая по оси X) и параметром № 8152 (составляющей по оси Z).
4. ОПИСАНИЕ ПАРАМЕТРОВ B-64700RU/01
8158
![]()
ПРЕДУПРЕЖДЕНИЕ!
После изменения значений параметров выполните ручной возврат обоих резцедержателей в исходную позицию. В противном случае отношения позиций двух резцедержателей, сохраняемые внутри системы, не получат вновь заданные значения параметров.
![]()
Схема системы координат с исходной позицией на основании резцедержателя траектории 1 в общей группе станков
[Тип ввода] Ввод параметров [Тип данных] Байт траектории
[Действительный диапазон данных] от 0 до 3
Данный параметр используется для контроля столкновений между несколькими траекториями, если бит 7 (IPF) параметра
№ 8140 равен 1.
Данный параметр задает схему системы координат с исходной позицией на основании резцедержателя траектории 1 в общей группе станков.
![]()