< Назад | Содержимое | Далее >
B-64700RU/01 4. ОПИСАНИЕ ПАРАМЕТРОВ
4.96 ПАРАМЕТРЫ ПРОГРАММ (4 ИЗ 5)
![]()
№7 №6 №5 №4 №3 №2 №1 №0
IPO |
11500
IPO |
[Тип ввода] Ввод параметров [Тип данных] Бит
№1 IPO Указатель упреждения обработки:
0: Выдается незамедлительно при выходе в заданную позицию. 1: Выдается после выдержки 1 периода интерполяции после
выхода в заданную позицию.
ПРИМЕЧАНИЕ
Данный параметр настраивается автоматически. Подробная информация приводится в приложении «Автоматическая настройка и начальная настройка параметров» в Руководстве по выполнению соединений (функциональная часть) (B-64693EN-1).
№7 №6 №5 №4 №3 №2 №1 №0
SUM | SUR | NWT | MSC |
11501
SUM | SUR | NWT | MSC |
[Тип ввода] Ввод параметров [Тип данных] Бит пути
№2 MSC Проверка величины смещения заблокированного станка в автоматическом режиме:
0: Не применяется.
1: Применяется.
ПРИМЕЧАНИЕ
1 Данная функция недействительна на оси, где действует состояние блокировки станка.
2 При сохранении величины смещения заблокированного станка допускается следующее:
- Автоматический возврат в исходную позицию (средняя точка не задана)
- Предварительная настройка системы координат заготовки
- Настройка локальной системы координат
- Настройка системы координат станка
- Настройка системы координат
- Настройка системы координат заготовки (движение по оси не задано)
3 При выполнении других автоматических операций без перемещений в система координат станка аварийный сигнал не выдается.
4 Данная функция недействительна на мнимой оси. (бит 4 (KSV) параметра № 11802=1 или бит 0 (DMY) параметра № 2009 =1)
№3 NWT При запуске автоматической операции время с заднего фронта сигнала запуска цикла ST до запуска автоматической операции: 0: Стандартное.
1: Сокращенное.
![]()
4. ОПИСАНИЕ ПАРАМЕТРОВ B-64700RU/01
ПРИМЕЧАНИЕ
Данный параметр используется при начальной настройке. Подробная информация приводится в приложении
«Автоматическая настройка и начальная настройка параметров» в Руководстве по выполнению соединений (функциональная часть) (B-64693EN-1).
№5 SUR Время начала обнаружения сигнала одного оборота при нарезании резьбы:
0: Стандартное.
1: Скоростное исполнение.
ПРИМЕЧАНИЕ
Данный параметр настраивается автоматически. Подробная информация приводится в приложении «Автоматическая настройка и начальная настройка параметров» в Руководстве по выполнению соединений (функциональная часть) (B-64693EN-1).
№6 SUM Увеличение скорости команд G28, G30 и G53: 0: Откл.
1: Вкл.
ПРИМЕЧАНИЕ
Данный параметр настраивается автоматически. Подробная информация приводится в приложении «Автоматическая настройка и начальная настройка параметров» в Руководстве по выполнению соединений (функциональная часть) (B-64693EN-1).
№7 №6 №5 №4 №3 №2 №1 №0
IPW | CTC | PSU | CMS | WPP |
11502
IPW | CTC | PSU | CMS | WPP |
[Тип ввода] Ввод параметров [Тип данных] Бит
№2 WPP Программируемый ввод параметров командой (G10) при повторной настройке, для которого требуется отключение питания:
0: Откл.
1: Вкл.
ПРИМЕЧАНИЕ
Присвоение биту 2 (WPP) параметра № 11502 значения 1 позволяет выполнять программируемый ввод параметров командой (G10) при повторной настройке, для которого требуется отключение питания, даже если «ЗАПИС.ПАРАМ» отключена.
№3 CMS При вводе запуска цикла в режиме MEM/RMT без сброса во время вызова подпрограммы/макроса в режиме MDI:
0: Аварийный сигнал не выдается.
1: Выдается аварийный сигнал PS0525 SUBPROGRAM/MACRO CALLING .
![]()
B-64700RU/01 4. ОПИСАНИЕ ПАРАМЕТРОВ
ПРИМЕЧАНИЕ
Данный параметр настраивается автоматически. Подробная информация приводится в приложении «Автоматическая настройка и начальная настройка параметров» в Руководстве по выполнению соединений (функциональная часть) (B-64693EN-1).
№4 PSU Программируемый ввод параметров (G10L50/52):
0: выполняется с нормальной скоростью (стандартный ввод) 1: выполняется с высокой скоростью.
№5 CT2 Во время перемещения по оси постоянная времени ускорения/замедления при рабочей подаче на каждой оси (параметр № 1622):
0: Защищена от записи.
1: Не защищена от записи.
№6 CTC Во время перемещения по оси постоянная времени ускорения/замедления ускоренного перемещения на каждой оси (параметр № 1620):
0: Защищена от записи.
1: Не защищена от записи.
№7 IPW Упреждающий коэффициент опережающего просмотра (параметр
№ 2092) и бит 0 (SMR) параметра № 8162, определяющие применение зеркального отображения во время синхронного управления:
0: Защищены от записи во время перемещения по оси.
1: Имеют возможность записи, если соответствующая ось остановлена.
№7 №6 №5 №4 №3 №2 №1 №0
HIC | ASE |
11503
HIC | ASE |
[Тип ввода] Ввод параметров [Тип данных] Бит
№2 ASE Повышение точности фактической позиции станка при увеличении скорости отражения погрешности позиционирования сервопривода:
0: Недействительно.
1: Действительно.
ПРИМЕЧАНИЕ
1 Данный параметр действителен при считывании фактической позиции станка в окне PMC (WINDR:SUB51), FOCAS2 и переключатель положения. Если данный параметр равен 1, изменяется считывание фактической позиции станка.
2 Данный параметр настраивается автоматически. Подробная информация приводится в приложении «Автоматическая настройка и начальная настройка параметров» в Руководстве по выполнению соединений (функциональная часть) (B-64693EN-1).
![]()
4. ОПИСАНИЕ ПАРАМЕТРОВ B-64700RU/01
№4 HIC При проверке выхода в заданную позицию оси, управляемой сервоприводом:
0: Следующий кадр начинается со следующего цикла интерполяции, который выполняет выход в заданную позицию.
1: Следующий кадр начинается с цикла интерполяции при выходе в заданную позицию.
ПРИМЕЧАНИЕ
Данный параметр настраивается автоматически. Подробная информация приводится в приложении «Автоматическая настройка и начальная настройка параметров» в Руководстве по выполнению соединений (функциональная часть) (B-64693EN-1).
№7 №6 №5 №4 №3 №2 №1 №0
BDA | BST |
11504
BDA | BST |
[Тип ввода] Ввод параметров [Тип данных] Бит
№5 BST Снижение времени операции для предотвращения буферизации: 0: Откл.
1: Вкл.
ПРИМЕЧАНИЕ
Данный параметр настраивается автоматически. Подробная информация приводится в приложении «Автоматическая настройка и начальная настройка параметров» в Руководстве по выполнению соединений (функциональная часть) (B-64693EN-1).
№6 BDA Если при отключении опционального пропуска кадра вводится значение в диапазоне с /2 по /9:
0: Аварийный сигнал не выдается.
1: Выдается аварийный сигнал PS0004
«НЕДЕЙСТВ.Т.ПРЕРЫВ.СЛОВ».
ПРИМЕЧАНИЕ
1 Данный параметр не используется при поиске номера последовательности.
2 Данный параметр не используется в исполнителе макросов (стандартных макросов, вспомогательных макросов).
№7 №6 №5 №4 №3 №2 №1 №0
ISU |
11505
ISU |
[Тип ввода] Ввод настройки [Тип данных] Бит
№0 ISU Если в качестве устройства ввода/вывода выбран
USB-накопитель, то ввод/вывод данных выполняется при помощи
0: Кодов ASCII.
1: Кодов ISO.
![]()
![]()
ПРЕДУПРЕЖДЕНИЕ!
1 Если данные не вводятся в кодировке ASCII, задайте этому параметру значение 1, чтобы ввод и вывод данных производился в кодировке ISO.
2 При вводе/выводе данных в кодировке ASCII необходимо соблюдать осторожность, так как в этом случае не добавляются данные четности и не регистрируется ошибка данных при вводе/выводе данных.
B-64700RU/01 4. ОПИСАНИЕ ПАРАМЕТРОВ
№7 №6 №5 №4 №3 №2 №1 №0
SFU | PCU |
11506
SFU | PCU |
[Тип ввода] Ввод параметров [Тип данных] Бит
№0 PCU Интерфейс USB-накопителя, при его наличии на стороне ЧПУ, используется при запуске функции отображения на экране ЧПУ через интерфейс HSSB, расположенный на:
0: На стороне ЧПУ. 1: На стороне ПК.
ПРИМЕЧАНИЕ
1 Интерфейс USB-накопителя на стороне ПК используется независимо от настройки данного параметра, если на основном блоке ЧПУ отсутствует интерфейс USB-накопителя.
2 Данный параметр действителен только, если активирована функция отображения экрана ЧПУ через интерфейс HSSB. Если данный параметр равен 1, то функция отображения экрана ЧПУ всегда выполняется через интерфейс HSSB.
3 Чтобы выполнить функцию отображения экрана ЧПУ через интерфейс Ethernet, задайте 0.
4 При настройке данного параметра отключите питание, прежде чем продолжить работу.
№1 SFU В USB-накопителе имя файла отображается: 0: В стандартном виде.
1: С коротким именем файла (формат 8.3).
№7 №6 №5 №4 №3 №2 №1 №0
SAC | PNT | HSR |
11507
SAC | PNT | HSR |
[Тип ввода] Ввод параметров [Тип данных] Бит
ПРИМЕЧАНИЕ
При настройке любого из данных параметров отключите питание, прежде чем продолжить работу.
№3 HSR Увеличение скорости обработки RS-232C: 0: Откл.
1: Вкл.
![]()
4. ОПИСАНИЕ ПАРАМЕТРОВ B-64700RU/01
ПРИМЕЧАНИЕ
1 Если данный параметр равен 0, связь осуществляется ниже заданной скорости передачи данных RS-232C.
2 Данный параметр настраивается автоматически. Подробная информация приводится в приложении «Автоматическая настройка и начальная настройка параметров» в Руководстве по выполнению соединений (функциональная часть) (B-64693EN-1).
№6 PNT Если BPRNT/DPRNT в пользовательском макросе задается непрерывно:
0: TV-проверка выполняется после 2-го раза.
1: TV-проверка не выполняется. (ввод совпадает с FS16i)
№#7 SAC При проверке достижения частоты вращения шпинделя SAR<Gn029.4> в постоянном цикле сверления:
0: Выполняется выдержка, заданная параметром № 3740, при запуске всех операций сверления.
1: Выполняется выдержка, заданная параметром № 3740, при запуске только первой операции сверления. Доступно совмещение кадров между ускоренным перемещением и начальным запуском и ускоренным перемещением на позицию отверстия.
ПРИМЕЧАНИЕ
При настройке данного параметра отключите питание, прежде чем продолжить работу.
Данный параметр действителен, если бит 0 (SAR) параметра
№ 3708 равен 1.
Совмещение кадров при ускоренном перемещении доступно, если бит 4 (RTO) параметра № 1601 равен 1.
№7 №6 №5 №4 №3 №2 №1 №0
FAXx |
11525
FAXx |
[Тип ввода] Ввод параметров [Тип данных] Бит оси
№7 FAXx При быстрой настройке времени цикла групповая настройка рекомендуемых значений (ось):
0: отключена.
1: включена.
№7 №6 №5 №4 №3 №2 №1 №0
FSP |
11527
FSP |
[Тип ввода] Ввод параметров [Тип данных] Бит шпинделя
№7 FSPs При быстрой настройке времени цикла групповая настройка рекомендуемых значений (шпиндель):
0: отключена.
1: включена.
![]()
B-64700RU/01 4. ОПИСАНИЕ ПАРАМЕТРОВ
11530
Предаварийное значение (общее для каналов 1, 2 и 3) счетчика попыток I/O link
ПРИМЕЧАНИЕ
При настройке данного параметра отключите питание, прежде чем продолжить работу.
[Тип ввода] Ввод параметров [Тип данных] Байт
[Единица данных] Значение счетчика коррекции /8 часов [Действительный диапазон данных] от 0 до 127
Рекомендуемая настройка = 0
Задает предаварийное значение счетчика попыток соединения I/O link.
Когда значение 8-часового счетчика коррекции погрешностей становится больше или равно данной уставке, выдаются предаварийные сигналы неисправности соединений I/O Link 1,2,3 с WIOCH1 по WIOCH3 <с F0535.0 по F0535.2>.
Если уставка равна 0, мониторинг производится по 5 попыткам за 8 часов.
11531
Предаварийное значение счетчика исправлений ECC (SRAM)
ПРИМЕЧАНИЕ
При настройке данного параметра отключите питание, прежде чем продолжить работу.
[Тип ввода] Ввод параметров [Тип данных] Байт
[Единица данных] Значение счетчика коррекции /8 часов [Действительный диапазон данных] от 0 до 127
Рекомендуемая настройка = 0
Задает предаварийное значение счетчика исправлений SRAM. Когда значение 8-часового счетчика коррекции погрешностей становится больше или равно данной уставке, выдается предаварийный сигнал неисправности SRAM ECC WECCS
<F0535.3>.
Если уставка равна 0, мониторинг производится по 5 попыткам за 8 часов.
11532
Предаварийное значение количества обнаруженных ошибок встроенного интерфейса сети Ethernet
ПРИМЕЧАНИЕ
При настройке данного параметра отключите питание, прежде чем продолжить работу.
[Тип ввода] Ввод параметров [Тип данных] Байт
[Единица данных] Количество обнаружений за минуту
![]()
4. ОПИСАНИЕ ПАРАМЕТРОВ B-64700RU/01
[Действительный диапазон данных] от 0 до 127
Рекомендуемая настройка = 0
Задает предаварийное значение количества обнаруженных ошибок встроенного интерфейса сети Ethernet.
Когда количество обнаруженных ошибок за 1 минуту становится больше или равно данной уставке, выдается предаварийный сигнал неисправности связи встроенного интерфейса сети Ethernet WETE <F0535.4>.
Если уставка равна 0, мониторинг производится по 10 ошибкам за 1 минуту.
11533
Предаварийное значение количества обнаруженных ошибок Fast Ethernet
ПРИМЕЧАНИЕ
При настройке данного параметра отключите питание, прежде чем продолжить работу.
[Тип ввода] Ввод параметров [Тип данных] Байт
[Единица данных] Количество обнаружений за минуту [Действительный диапазон данных] от 0 до 127
Рекомендуемая настройка = 0
Задает предаварийное значение количества обнаруженных ошибок Fast Ethernet.
Когда количество обнаруженных ошибок за 1 минуту становится больше или равно данной уставке, выдается предаварийный сигнал неисправности связи Fast Ethernet WETF <F0535.5>.
Если уставка равна 0, мониторинг производится по 10 ошибкам за 1 минуту.
11534
Предаварийное значение (общее для плат FL-net 1 и 2) количества обнаруженных ошибок FL-net
ПРИМЕЧАНИЕ
При настройке данного параметра отключите питание, прежде чем продолжить работу.
[Тип ввода] Ввод параметров [Тип данных] Байт
[Единица данных] Количество обнаружений за минуту [Действительный диапазон данных] от 0 до 127
Рекомендуемая настройка = 0
Задает предаварийное значение количества обнаруженных ошибок FL-net.
Когда количество обнаруженных ошибок за 1 минуту становится больше или равно данной уставке, выдаются предаварийные сигналы неисправности связи FL-net WFLN1, WFLN2
<F0535.6, F0535.7>.
Если уставка равна 0, мониторинг производится по 3 ошибкам за 1 минуту.
![]()
B-64700RU/01 4. ОПИСАНИЕ ПАРАМЕТРОВ
№7 №6 №5 №4 №3 №2 №1 №0
WT1 |
11538
WT1 |
[Тип ввода] Ввод параметров [Тип данных] Бит
ПРИМЕЧАНИЕ
При настройке данного параметра отключите питание, прежде чем продолжить работу.
№6 WT1 В автоматическом режиме повышение скорости между кадрами: 0: Недействительно.
1: Действителен.
ПРИМЕЧАНИЕ
Данный параметр настраивается автоматически. Подробная информация приводится в приложении «Автоматическая настройка и начальная настройка параметров» в Руководстве по выполнению соединений (функциональная часть) (B-64693EN-1).
№7 №6 №5 №4 №3 №2 №1 №0
ICX |
11539
ICX |
[Тип ввода] Ввод параметров [Тип данных] Бит
№3 ICX Отображение исполнителя языка C или изображения FANUC на iPendant:
0: Недоступно.
1: Доступно.
№7 №6 №5 №4 №3 №2 №1 №0
AP5 | APS |
11549
AP5 | APS |
[Тип ввода] Ввод параметров [Тип данных] Бит
ПРИМЕЧАНИЕ
При настройке данного параметра отключите питание, прежде чем продолжить работу.
№0 APS Функция автоматической настройки оси управления PS, автоматической настройки параметров:
0: Не выполняется.
1: Выполняется.
ПРИМЕЧАНИЕ
После завершения автоматической настройки оси управления PS данный параметр становится равным 0.
![]()
4. ОПИСАНИЕ ПАРАМЕТРОВ B-64700RU/01
№6 AP5 В системе с несколькими траекториями контурное управление искусственным интеллектом:
0: Не выполняется одновременно более чем на 5 траекториях. (Обязательно задайте 0, если контурное управление искусственным интеллектом не выполняется одновременно более чем на 5 траекториях.)
1: Выполняется одновременно более чем на 5 траекториях. (Обязательно задайте 1, если контурное управление искусственным интеллектом выполняется одновременно более чем на 5 траекториях.)
ПРИМЕЧАНИЕ
В режиме контурного управления искусственным интеллектом одновременно более чем на 5 траекториях, когда настройка данного параметра не равна 1, производительность может быть недостаточной.
11550
M-код для команды удаления гибкого назначения осей на траектории
ПРИМЕЧАНИЕ
При настройке данного параметра отключите питание, прежде чем продолжить работу.
[Тип ввода] Ввод параметров [Тип данных] Слово пути
[Действительный диапазон данных] от 0 до 32767
При использовании сигнала гибкого назначения осей на траектории M-код команды удаления задается для каждой траектории.
11551
M-код для команды назначения при гибком назначении осей на траектории
ПРИМЕЧАНИЕ
При настройке данного параметра отключите питание, прежде чем продолжить работу.
[Тип ввода] Ввод параметров [Тип данных] Слово пути
[Действительный диапазон данных] от 0 до 32767
При использовании сигнала гибкого назначения осей на траектории M-код команды назначения задается для каждой траектории.
![]()
B-64700RU/01 4. ОПИСАНИЕ ПАРАМЕТРОВ
11552
M-код для команды обмена при гибком назначении осей на траектории
ПРИМЕЧАНИЕ
При настройке данного параметра отключите питание, прежде чем продолжить работу.
[Тип ввода] Ввод параметров [Тип данных] Слово пути
[Действительный диапазон данных] от 0 до 32767
При использовании сигнала гибкого назначения осей на траектории M-код команды обмена задается для каждой траектории.
11553
Адрес команды в пользовательской области внутреннего реле (R)
ПРИМЕЧАНИЕ
При настройке данного параметра отключите питание, прежде чем продолжить работу.
[Тип ввода] Ввод параметров [Тип данных] Двойное слово оси
[Действительный диапазон данных] от 0 до 59999
![]()
ПРЕДУПРЕЖДЕНИЕ!
Если внутренняя смена адреса данного параметра используется для другой операции, это может привести к непредсказуемому поведению станка. Примите меры, чтобы не создавать конфликтов использования внутренней смены.
При использовании сигнала гибкого назначения осей на траектории адрес команды в пользовательской области внутреннего реле (R) задается на каждой оси. Из уставки каждой оси используются 3 байта.
ПРИМЕЧАНИЕ
1 Задайте значение, кратное четырем (0, 4, 8, …).
2 Диапазон R-адреса определяется типом PMC и емкостью памяти. Проверьте технические характеристики PMC и задайте значение действительного диапазона.
(Пример: Если используется память B первого PMC, диапазон R-адресов соответствует от R0 до R7999.
3 Сигнал гибкого назначения осей не доступен на оси, если данный параметр равен 0.
4 Данный параметр действителен на первом PMC.
![]()
4. ОПИСАНИЕ ПАРАМЕТРОВ B-64700RU/01
11554
Адрес пользовательской области внутреннего реле (R) для информации об отдельной оси
ПРИМЕЧАНИЕ
При настройке данного параметра отключите питание, прежде чем продолжить работу.
[Тип ввода] Ввод параметров [Тип данных] Двойное слово оси
[Действительный диапазон данных] от 0 до 59999
Задает адрес пользовательской области внутреннего реле (R) для выводимой информации об отдельной оси. Информация выводится только для оси, заданной данным параметром. Для каждой оси используются три байта в начале данной настройки.
ПРИМЕЧАНИЕ
1 Данная уставка должна быть кратна 4 (4, 8, ...).
2 Данная функция отключается, если данный параметр равен 0.
3 При управлении несколькими траекториями следует предотвратить наложение адресов одной траектории на другие траектории.
4 Область адресов R зависит от используемого PMC и его памяти. Проверьте технические характеристики PMC, чтобы задать применимый диапазон. (Пример: Если используется память B первого PMC, диапазон R-адресов соответствует от R0 до R7999.
5 Данный параметр действителен на первом PMC.
11555
Имя оси, заданное гибким назначением оси на траектории
![]()
ПРЕДУПРЕЖДЕНИЕ!
Если внутренняя смена адреса данного параметра используется для другой операции, это может привести к непредсказуемому поведению станка. Примите меры, чтобы не создавать конфликтов использования внутренней смены.
[Тип ввода] Ввод параметров [Тип данных] Байт траектории
[Действительный диапазон данных] от 0 до 256
Если выбор оси производится битом 0 (PAN) параметра № 11564, используется заданное имя оси.
11556
Имя оси 2, заданное гибким назначением оси на траектории
[Тип ввода] Ввод параметров [Тип данных] Байт траектории
[Действительный диапазон данных] от 0 до 256
Если выбор оси производится битом 0 (PAN) параметра № 11564, используется заданное имя оси. Если используется расширенное имя оси (бит 0 (EEA) параметра № 1000=1), данное значение становится вторым символом в имени оси. В противном случае данное значение становится нижним индексом имени оси.
![]()
B-64700RU/01 4. ОПИСАНИЕ ПАРАМЕТРОВ
11557
Имя оси 3, заданное гибким назначением оси на траектории
[Тип ввода] Ввод параметров [Тип данных] Байт траектории
[Действительный диапазон данных] от 0 до 256
Если выбор оси производится битом 0 (PAN) параметра № 11564, используется заданное имя оси. Если используется расширенное имя оси (бит 0 (EEA) параметра № 1000=1), данное значение становится третьим символом в имени оси. Если второе имя оси (параметр № 11556) не задано, третье имя оси становится недействительным.
11560
Идентификационный номер оси, используемой гибким назначением оси на траектории
ПРИМЕЧАНИЕ
При настройке данного параметра отключите питание, прежде чем продолжить работу.
[Тип ввода] Ввод параметров [Тип данных] Слово оси
[Действительный диапазон данных] от 0 до 32767
Задает идентификационный номер оси, используемой гибким назначением оси на траектории. Заданное значение соответствует адресу P (Q, R), заданному программой.
№7 №6 №5 №4 №3 №2 №1 №0
FAC | FAM | FAO | FAW | FAR |
11561
FAC | FAM | FAO | FAW | FAR |
[Тип ввода] Ввод параметров [Тип данных] Бит
ПРИМЕЧАНИЕ
При настройке данного параметра отключите питание, прежде чем продолжить работу.
№0 FAR Гибкое назначение оси на траектории: 0: Откл.
1: Вкл.
ПРИМЕЧАНИЕ
При настройке параметра FAR стираются все хронологические данные (журнал операций, журнал аварийных сигналов и журнал внешних сообщений оператору) при следующем включении питания.
№1 FAW Если выдается команда назначения для еще не свободной оси при гибком назначении оси на траектории:
0: Команда ожидает освобождения оси. 1: Выдается аварийный сигнал PS0514
«НЕДОПУСТ.КОМАНДА В НАЗНАЧЕНИИ ГИБКОЙ ТРАЕКТОРИИ».
![]()
4. ОПИСАНИЕ ПАРАМЕТРОВ B-64700RU/01
№2 FAO При отключении и повторном включении питания, когда используется гибкое назначение оси на траектории, то конфигурация оси:
0: Возвращается в исходном состоянии (заданном параметром № 0981).
1: Сохраняется в последнем состоянии.
№3 FAM Способ ввода команды программой при гибком назначении оси на траектории:
0: По идентификационному номеру. 1: По имени оси.
№41 FAC Если выдается команда удаления для уже удаленной или назначенной на другую траекторию оси при гибком назначении оси на траектории:
0: Выдается аварийный сигнал PS0514
«НЕДОПУСТ.КОМАНДА В НАЗНАЧЕНИИ ГИБКОЙ ТРАЕКТОРИИ».
1: Команда игнорируется.
№7 №6 №5 №4 №3 №2 №1 №0
FHEx | FANx |
11562
FHEx | FANx |
[Тип ввода] Ввод параметров [Тип данных] Бит оси
№1 FANx При гибком назначении оси на траектории после обмена имена оси соответствуют:
0: Ранее заданным для каждой оси.
1: Именам других осей в паре обмена.
ПРИМЕЧАНИЕ
Параметр FANx недействителен, если выдается команда получения оси при гибком назначении оси на траектории. Наследуется имя, заданное для каждой оси.
№2 FHEx При гибком назначении оси на траектории, если бит 3 (FHM) параметра № 11565 равен 1, то такая ось:
0: Не назначается на траекторию, у которой количество кадров с упреждающим чтением больше, чем на начальной траектории, к которой принадлежала ось.
1: Назначается на траекторию, у которой количество кадров с упреждающим чтением больше, чем на начальной траектории, к которой принадлежала ось.
№7 №6 №5 №4 №3 №2 №1 №0
PPW | RRS | FAX | WUA | NMF | CSG |
11563
PPW | RRS | FAX | WUA | NMF | CSG |
[Тип ввода] Ввод параметров [Тип данных] Бит
ПРИМЕЧАНИЕ
При настройке данного параметра отключите питание, прежде чем продолжить работу.
![]()
B-64700RU/01 4. ОПИСАНИЕ ПАРАМЕТРОВ
№0 CSG Гибкое назначение оси на траектории задается: 0: Командой G-кода.
1: Настройкой сигнала PMC.
![]()
ПРЕДУПРЕЖДЕНИЕ!
Перед присвоением данному параметру значения 1 установите соответствующее значение параметра № 11553.
Если внутренняя смена адреса, заданного в параметре
№ 11553 используется для другой операции, это может привести к непредсказуемому поведению станка. Примите меры, чтобы не создавать конфликтов использования внутренней смены.
№2 NMF Сигнал режима прямого назначения DASN<G0536.5>: 0: Не используется
1: Используется.
№3 WUA В режиме прямого назначения при гибком назначении оси на траектории, если команду удаления нельзя выполнить:
0: Выдается аварийный сигнал DS0080
«НЕДОПУСТ.КОМАНДА В НАЗНАЧЕНИИ ГИБКОЙ ТРАЕКТОРИИ».
1: Ожидается удаление оси.
№4 FAX При гибком назначении оси на траектории, если ось, заданная в команде назначения, уже принадлежит указанной траектории:
0: Выдается аварийный сигнал PS0514
«НЕДОПУСТ.КОМАНДА В НАЗНАЧЕНИИ ГИБКОЙ ТРАЕКТОРИИ».
1: команда игнорируется.
№6 RRS При выполнении сброса назначение оси, измененное при гибком назначении оси на траектории:
0: Не изменяется.
1: Возвращается к исходному назначению.
№7 PPW Функция окна PMC при гибком назначении оси на траектории: 0: Номер траектории и номер оси изменяются гибким
назначении оси на траектории.
1: Сохраняется начальный номер траектории и номер оси (настройка параметра № 981).
№7 №6 №5 №4 №3 №2 №1 №0
PANx |
11564
PANx |
[Тип ввода] Ввод параметров [Тип данных] Бит оси
ПРИМЕЧАНИЕ
При настройке данного параметра отключите питание, прежде чем продолжить работу.
![]()
4. ОПИСАНИЕ ПАРАМЕТРОВ B-64700RU/01
№0 PANx Имя оси, которая назначена на каждую траекторию: 0: Не изменяется.
1: Изменяется на конкретное имя, выбранное на каждой траектории.
Данная настройка доступна только для одной оси на траектории.
№7 №6 №5 №4 №3 №2 №1 №0
FPS | FES | FHM | RTC |
11565
FPS | FES | FHM | RTC |
[Тип ввода] Ввод параметров [Тип данных] Бит
№1 RTC При гибком назначении оси на траекторию величина коррекции на геометрию инструмента и величина коррекции на инструмент: 0: Не отменяются и срабатывает аварийный сигнал PS0514 при
выдаче команды на гибкое назначение оси на траекторию.
1: Отменяются только на оси, для которой выдается команда на гибкое назначение оси на траекторию. В этом случае перемещение по оси не выполняется, независимо от способа коррекции на инструмент.
ПРИМЕЧАНИЕ
Данный параметр настраивается автоматически. Подробная информация приводится в приложении «Автоматическая настройка и начальная настройка параметров» в Руководстве по выполнению соединений (функциональная часть) (B-64693EN-1).
№3 FHM При гибком назначении оси на траекторию назначаемая ось, у которой количество кадров с упреждающим чтением больше, чем на начальной траектории, к которой принадлежала ось:
0: выбирается автоматически.
1: выбирается битом 2 (FHE) параметра № 11562.
№4 FES На оси, порядок которой на траектории изменяется гибким назначением оси на траектории, расширенное внешнее смещение нулевой точки станка:
0: не используется.
1: используется. (адрес R расширенного внешнего смещения нулевой точки станка не изменяется при гибком назначении оси на траекторию.)
№5 FPS При изменении порядка осей гибким назначением оси на траекторию выбор оси переключателем положения или скоростным переключателем положения:
0: зависит от порядка осей после гибкого назначения оси на траекторию.
1: всегда использует начальный порядок осей.
![]()
B-64700RU/01 4. ОПИСАНИЕ ПАРАМЕТРОВ
№7 №6 №5 №4 №3 №2 №1 №0
AX1 | D3A | D3IT | D3MV |
11600
AX1 | D3A | D3IT | D3MV |
[Тип ввода] Ввод параметров [Тип данных] Бит пути
№1 D3MV В приведенных ниже режимах сигналами перемещения по оси с MV1 по MV8<Fn102> являются:
- Преобразование трехмерной системы координат
- Индексация наклонной рабочей плоскости
0: Сигналы осей в системе координат программы. 1: Сигналы осей в системе координат заготовки.
№2 D3IT В режиме преобразования трехмерной системы координат действительными сигналами блокировки (сигнал блокировки каждой оси с *IT1 по *IT8 <Gn130> или сигналы блокировки направления каждой оси с +MIT1 по +MIT8<Gn132>, с -MIT1 по
-MIT8 <Gn134> и т. д.) являются:
0: Сигналы всех выбранных осей для преобразования трехмерной системы координат.
1: Сигналы осей, по которым совершается перемещение во время преобразования трехмерной системы координат.
№4 D3A При отмене преобразования трехмерной системы координат, если вектор коррекции не был отменен:
0: Выдается аварийный сигнал PS5462 «ЗАПРЕЩ. КОМАНДА (G68.2/G69)».
1: Аварийный сигнал не выдается.
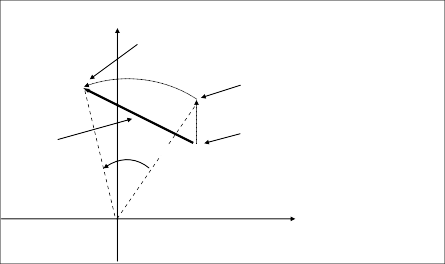
#5 AX1 Если в режиме поворота системы координат, в режиме абсолютных координат выдается команда из 1 оси:
0: Сначала рассчитывается заданная позиция в системе координат до поворота, затем выполняется поворот системы координат.
1: Сначала выполняется поворот системы координат, затем инструмент перемещается в заданную позицию в системе координат.
(ввод, совместимый с FS16i/18i/21i)
[Пример] G90 G0 X0 Y0
G01 X10. Y10. F6000
G68 X0 Y0 R45. Команда отмены поворота системы координат Y14.142 Команда из 1 оси (1)
G69
Если бит 5 (AX1) параметра № 11600 равен 0:
В системе координат (XY) перед поворотом заданная позиция рассчитывается, и после этого выполняется поворот системы координат. Таким образом, при выполнении команды, указанной в (1), незаданная позиция на оси X принимается равной X10, и заданная позиция имеет вид (X10, Y14.142). После этого инструмент перемещается в позицию перемещения (X-2.929,Y17.071) после поворота на 45 градусов.
![]()
Y
Y
Y
Позиция перемещения
: X-2.929,Y17.071
Позиция перемещения
: X-2.929,Y17.071
Позиция перемещения
: X-2.929,Y17.071
Заданное положение
: X10,Y14.142
Заданное положение
: X10,Y14.142
Заданное положение
: X10,Y14.142
Траектория
инструмента
Траектория
инструмента
Траектория
инструмента
45
градусов
45
градусов
45
градусов
●
●
●
Координаты до команды поворота системы координат
: X10,Y10
Координаты до команды поворота системы координат
: X10,Y10
Координаты до команды поворота системы координат
: X10,Y10
X
X
X
4. ОПИСАНИЕ ПАРАМЕТРОВ B-64700RU/01
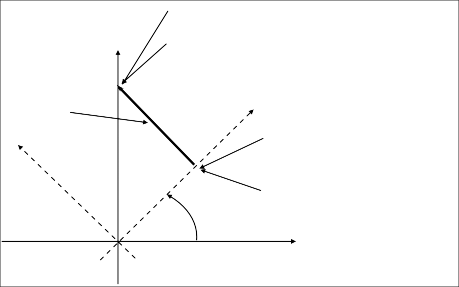
Если бит 5 (AX1) параметра № 11600 равен 1:
![]()
Y
Y
Y
Заданное положение: X'14.142,Y'14,142
Позиция перемещения: X0,Y20
Заданное положение: X'14.142,Y'14,142
Позиция перемещения: X0,Y20
Заданное положение: X'14.142,Y'14,142
Позиция перемещения: X0,Y20
Траектория
инструмента
Траектория
инструмента
Траектория
инструмента
X'
X'
X'
Y'
Y'
Y'
Координаты до команды поворота системы координат:
Координаты до команды поворота системы координат:
Координаты до команды поворота системы координат:
●
●
●
X10,Y10
X10,Y10
X10,Y10
Преобразование
Преобразование
Преобразование
Координаты после поворота
45 системы координат: градусов X'14.142,Y'0
X
Координаты после поворота
45 системы координат: градусов X'14.142,Y'0
X
Координаты после поворота
45 системы координат: градусов X'14.142,Y'0
X
Команда, указанная в (1), перед выдачей команды на поворот системы координат преобразует координаты (X10,Y10) в координаты (X'14.142,Y'0) системы координат, повернутой на 45 градусов (X'Y'). После этого инструмент перемещается в позицию (X'14.142,Y'14.142), т. е. в позицию перемещения (X0,Y20).
№7 №6 №5 №4 №3 №2 №1 №0
SBN |
11601
SBN |
[Тип ввода] Ввод параметров [Тип данных] Бит
№6 SBN При использовании обратной связи по двум позициям и мониторинга полузамкнутой погрешности, используемой в функции сервопривода, плавная коррекция мертвого хода выполняется:
0: По настройке бита 4 параметра № 2206 и бита 5 параметра
№ 2010.
1: На стороне полузамкнутой цепи.
![]()
B-64700RU/01 4. ОПИСАНИЕ ПАРАМЕТРОВ
№7 №6 №5 №4 №3 №2 №1 №0
NCP | NDO | TFO | R53 |
11602
NCP | NDO | TFO | R53 |
[Тип ввода] Ввод параметров [Тип данных] Бит пути
№2 R53 В непрерывном кадре скоростной команды G53 при ускоренном перемещении с интерполяцией или фиксированном ускоренном перемещении совмещение ускоренных перемещений:
0: Недействительно.
1: Действительно.
ПРИМЕЧАНИЕ
Данный параметр настраивается автоматически. Подробная информация приводится в приложении «Автоматическая настройка и начальная настройка параметров» в Руководстве по выполнению соединений (функциональная часть) (B-64693EN-1).
№3 TFO При ускоренном перемещении с линейной интерполяцией и постоянным по времени ускорением/замедлением совмещение ускоренных перемещений:
0: Недействительно.
1: Действительно.
ПРИМЕЧАНИЕ
Данный параметр настраивается автоматически. Подробная информация приводится в приложении «Автоматическая настройка и начальная настройка параметров» в Руководстве по выполнению соединений (функциональная часть) (B-64693EN-1).
№4 NDO Если в кадре с командой отмены стандартного контроля направлений (G40.1) имеется команда рабочей подачи и в следующем кадре также содержится команда рабочей подачи:
0: Перемещение из следующего кадра выполняется после останова с замедлением.
1: Перемещение из следующего кадра выполняется без ожидания останова с замедлением.
№5 NCP При наличии кадра без нарезания резьбы между двумя кадрами нарезания резьбы во втором кадре нарезания резьбы:
0: Выполняется выдержка до обнаружения сигнала одного оборота шпинделя и сигнала достижения частоты вращения шпинделя SAR <Gn029.4>.
1: Не выполняется выдержка до обнаружения сигнала одного оборота шпинделя и сигнала достижения частоты вращения шпинделя SAR <Gn029.4>, если не задан G-код в группе 01 без нарезания резьбы. (ввод, совместимый с FS16i).
![]()
4. ОПИСАНИЕ ПАРАМЕТРОВ B-64700RU/01
№7 №6 №5 №4 №3 №2 №1 №0
BNM |
11620
BNM |
[Тип ввода] Ввод параметров [Тип данных] Бит пути
№0 BNM В программе с непрерывной рабочей подачей (G01) в режиме контурного управления искусственным интеллектом, если имеется промежуточный кадр с командой такой же позиции:
0: Выполняется останов с замедлением.
1: Кадр с командой такой же позиции игнорируется и останов с замедлением не выполняется, совмещая следующий кадр.
ПРИМЕЧАНИЕ
Данный параметр настраивается автоматически. Подробная информация приводится в приложении «Автоматическая настройка и начальная настройка параметров» в Руководстве по выполнению соединений (функциональная часть) (B-64693EN-1).
№7 №6 №5 №4 №3 №2 №1 №0
M5B | TFR | MDE | FRD |
11630
M5B | TFR | MDE | FRD |
[Тип ввода] Ввод параметров [Тип данных] Бит пути
№0 FRD Минимальная единица ввода углов вращения при повороте координат и преобразовании трехмерной системы координат:
0: 0,001 градуса.
1: 0,00001 градуса. (1/100,000)
№1 MDE В режиме MDI вызов внешней подпрограммы устройства (команда M198):
0: Откл.
1: Вкл.
ПРИМЕЧАНИЕ
Если бит 1 (MDE) параметра № 11630=0, при вводе M198 выдается аварийный сигнал PS1081 EXT DEVICE SUB PROGRAM CALL MODE ERROR.
№0 TFR Минимальная единица ввода углов вращения при индексации наклонной рабочей плоскости:
0: 0,001 градуса.
1: 0,00001 градуса.
№5 M5B Число M-кодов, которые можно задавать в одном кадре:
0: Один (до трех, если бит 7 (M3B) параметра № 3404 равен 1)
1: До пяти.
![]()
B-64700RU/01 4. ОПИСАНИЕ ПАРАМЕТРОВ
11647
Номер местной переменной, соответствующий адресу оси
[Тип ввода] Ввод параметров [Тип данных] Байт ось
[Единица данных] Отсутствует [Действительный диапазон данных] от 0 до 33
Адрес, использующийся в виде аргумента вызова макроса, присваивается номеру местной переменной.
Данный параметр позволяет использовать адрес расширенного имени оси в качестве аргумента макровызова.
№7 №6 №5 №4 №3 №2 №1 №0
ESE | M99 |
11648
ESE | M99 |
[Тип ввода] Ввод параметров [Тип данных] Бит
№0 M99 При выполнении M99 в покадровом режиме:
0: Операция останавливается после выполнения предыдущего кадра возврата.
1: Операция останавливается перед выполнением предыдущего кадра возврата.
Данная функция используется только, если M99 задан в следующих программах.
- Исполнение макросов с помощью исполнителя макросов.
- Программы в папке //CNC_MEM/SYSTEM (*1)
- Программы в папке //CNC_MEM/MTB1 (встроенный макрос) (*1)
- Программы в папке //CNC_MEM/MTB2 (*1)
- Программы с O-номером в диапазоне, заданном параметрами 11656 и 11657.
(*1) Применимо только для программ, помещенных непосредственно в каждую папку. При помещении программы в созданную вложенную папку параметр M99 недействителен для такой программы.
№2 ESE Оператор ELSE оператора IF: 0: Не используется
1: Используется. Добавляется следующий ввод.
- К оператору IF добавляются следующий формат инструкций.
- IF[<выражение условия>] THEN; несколько операторов; ENDIF;
- IF[<выражение условия>] THEN оператор макроса1;
ELSE оператор макроса2;
- IF[<выражение условия>] THEN; несколько операторов1;
ELSE; несколько операторов2; ENDIF;
- Вложение оператора IF включено.
- ELSE и ENDIF добавляются в качестве зарезервированных слов.
![]()
4. ОПИСАНИЕ ПАРАМЕТРОВ B-64700RU/01
11649
Количество общих переменных пользовательских макросов на каждой траектории (с 98000 по 98499)
[Тип ввода] Ввод параметров [Тип данных] Слово
[Действительный диапазон данных] от 0 до 500
ПРИМЕЧАНИЕ
При настройке данного параметра отключите питание, прежде чем продолжить работу.
Если используются общие переменные пользовательского макроса, данный параметр задает количество общих переменных пользовательских макросов, доступных для совместного использования среди общих переменных с 98000 по 98499. Не допускайте превышения максимального количества допустимых общих переменных макросов.
Пример
Если параметру № 11649 задано 100
от 98000 до 98099 Переменные доступны на всех траекториях от 98100 до 98499 Переменные используются отдельно на каждой траектории
ПРИМЕЧАНИЕ
1. Для добавления общих переменных пользовательского макроса требуется значение 1000.
2. Если задан 0 или отрицательное значение, общие переменные пользовательских макросов не используются на каждой траектории.
3. С помощью бита 0 (NC4) параметра № 11654 задается общее/независимое использование переменных на каждой траектории.
№7 №6 №5 №4 №3 №2 №1 №0
DCO | SMI |
11651
DCO | SMI |
[Тип ввода] Ввод параметров [Тип данных] Бит пути
№1 SMI Когда задействован оператор GOTO, использующий сохраненные номера последовательностей, или оператор LGOTO, использующий сохраненную метку, и выполняется операция памяти программы на сервере данных или карте памяти номера последовательности/LBL[метка] в программе:
0: Сохраняются.
1: Не сохраняются.
![]()
B-64700RU/01 4. ОПИСАНИЕ ПАРАМЕТРОВ
ПРИМЕЧАНИЕ
1 Данный параметр действителен, если бит 4 (HGO) параметра
№ 6000 равен 1 или бит 1 (MGO) параметра № 6000 равен 1.
2 Данный параметр настраивается автоматически. Подробная информация приводится в приложении «Автоматическая настройка и начальная настройка параметров» в Руководстве по выполнению соединений (функциональная часть) (B-64693EN-1).
№7 DCO Во время пробного прогона время резания: 0: Не подсчитывается.
1: Подсчитывается.
11652
Начальный номер защищенных общих переменных среди общих переменных (с 98000 по 98499)
11653
Конечный номер защищенных общих переменных среди общих переменных (с 98000 по 98499)
[Тип ввода] Ввод параметров
[Тип данных] Траектория, состоящая из 2 слов [Действительный диапазон данных] 0, от 98000 до 98499
Данный параметр задает диапазон общих переменных в диапазоне от 98000 до 98499, которые можно защитить (задавая им свойство «только для чтения»). Если значение записывается в защищенную переменную (слева), выдается аварийный сигнал.
ПРИМЕЧАНИЕ
Задайте 0 в обоих параметрах № 11652 и 11653, чтобы не устанавливать защиту общих переменных.
№7 №6 №5 №4 №3 №2 №1 №0
NC4 |
11654
NC4 |
[Тип ввода] Ввод параметров [Тип данных] Бит пути
ПРИМЕЧАНИЕ
При настройке данного параметра отключите питание, прежде чем продолжить работу.
№0 NC4 Параметр № 11649 (Количество общих переменных пользовательских макросов на каждой траектории с 98000 по 98499):
0: Действует.
Номер переменной пользовательского макроса с 98000 по 98499 на данной траектории, заданный в параметре № 11649, становится номером переменных, используемых совместно на каждой траектории.
1: Не действует.
Номер переменной пользовательского макроса с 98000 по 98499 на данной траектории не действует на другой траектории.
![]()
4. ОПИСАНИЕ ПАРАМЕТРОВ B-64700RU/01
ПРИМЕЧАНИЕ
Задайте 0 данному параметру для траектории 1.
Пример
В системе с 4 траекториями, если используется приведенная ниже настройка параметров, на данных траекториях в качестве общих переменных используются переменные пользовательских макросов для траекторий с 1 по 3; при этом на траектории 4 независимо используются только переменные пользовательских макросов для траектории 4.
Номер траектории | № 11649 | NC4 | Используемые переменные пользовательских макросов |
1 | 100 | 0 | На этих траекториях в качестве общих переменных используются переменные пользовательских макросов с 98000 по 98099, а также прочие переменные пользовательских макросов, используемые отдельно. |
2 | 0 | ||
3 | 0 | ||
4 | 1 | Все переменные пользовательских макросов, используемые отдельно на траектории 4 |
11656
Первый O-номер программы для активации параметра M99 (бит 0 параметра № 11648)
[Тип ввода] Ввод параметров
[Тип данных] Траектория, состоящая из 2 слов [Действительный диапазон данных] от 1 до 99999999
Задает первый O-номер для активации параметра M99 (бит 0 параметра № 11648).
Если данный параметр равен 0, ввод O-номера, активирующего параметр M99, становится недействительным.
11657
Номер программ для активации параметра M99 (бит 0 параметра № 11648)
[Тип ввода] Ввод параметров
[Тип данных] Траектория, состоящая из 2 слов [Действительный диапазон данных] от 1 до 99999999
Задает номер программ для активации параметра M99 (бит 0 параметра № 11648).
Если данный параметр равен 0, ввод O-номера, активирующего параметр M99, становится недействительным.
№7 №6 №5 №4 №3 №2 №1 №0
MMB |
11658
MMB |
[Тип ввода] Ввод параметров [Тип данных] Бит пути
№0 MMB При наличии нескольких M-команд в одном кадре ввод любой M-команды, со второй по пятую параметрами с 3411 по 3420, с 3421 по 3432 или с 11290 по 11299 M-команда:
0: Не определяется как M-код, предотвращающий буферизацию.
1: Определяется как M-код, предотвращающий буферизацию.
![]()
![]()
ВНИМАНИЕ!
1 Независимо от настройки бита 0 (MMB) параметра № 11658, первую из нескольких команд в одиночном кадре можно задать в качестве M-кода, предотвращающего буферизацию.
2 Даже если бит 0 (MMB) параметра № 11658 равен 1, в одиночном кадре должен быть только один M00, M01, M02, M30 или предотвращающий буферизацию M-код, заданный любым параметром, кроме указанных выше.
Если любой из данных M-кодов задан в любой из нескольких M-команд, со второй по пятую, в одиночном кадре, M-команда не определяется как M-код, предотвращающий буферизацию.